
RTK測位の2つの状態。FloatとFixの違いとは?
RTK(リアルタイムキネマティック)測位は、衛星からの搬送波位相を利用して、センチメーター級の高精度な位置情報をリアルタイムに取得する技術である。
しかし、RTK測位を開始した瞬間から数cm精度が得られるわけではない。
測位プロセスには必ず2つの段階が存在する。それが「Float解」と「Fix解」だ。
この違いを理解し、現場で正しく運用することが、RTK測位の精度を引き出す必須条件なのである。
Float解(浮動解)とは何か?
Float解は、RTK測位の初期段階で得られる暫定的な測位解である。衛星からの搬送波の波数(整数値バイアス)が未確定のままの状態を指す。
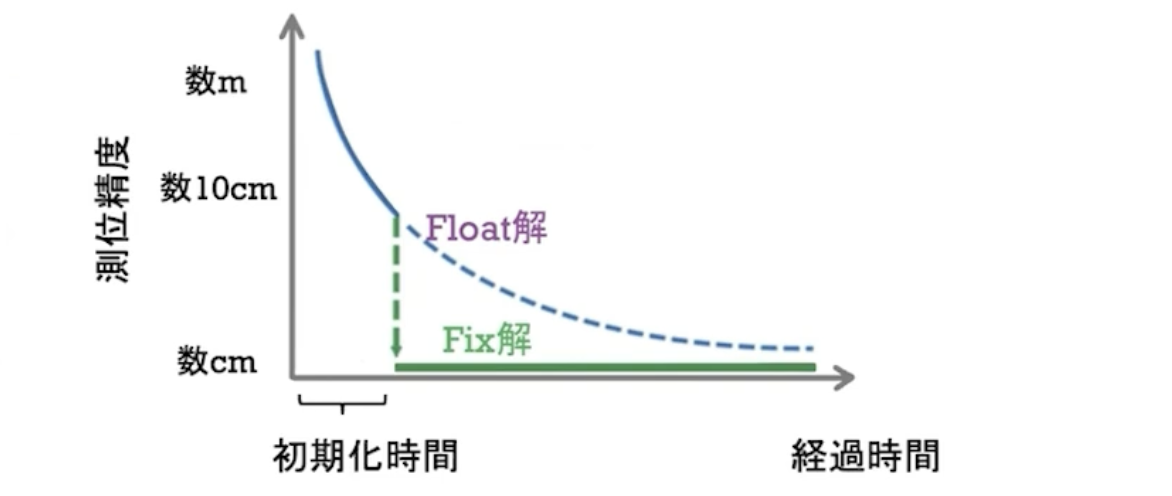
Float解の精度はおおよそ「数十cm~数m」と定義されており、測位環境によってばらつきがある。
Float解の測位値は時間とともに変動しており、安定していない。つまり、Float解のままでは「高精度なRTK測位が実現していない」という点だ。
Fix解(固定解)とは何か?
一方でFix解は、RTK測位において搬送波の波数が正しく確定した状態を指す。このとき、RTK測位は本来の精度を発揮する。
より正確には、水平位置で2~3cm程度、垂直方向でも数cm~数十cm程度の誤差に収まるとされている(もちろん測位環境や機器によって異なることは留意したい)
Fix解とFloat解の差は、単なる精度の違いではなく、RTK測位の「状態」の違いなのだ。
 (画像元:
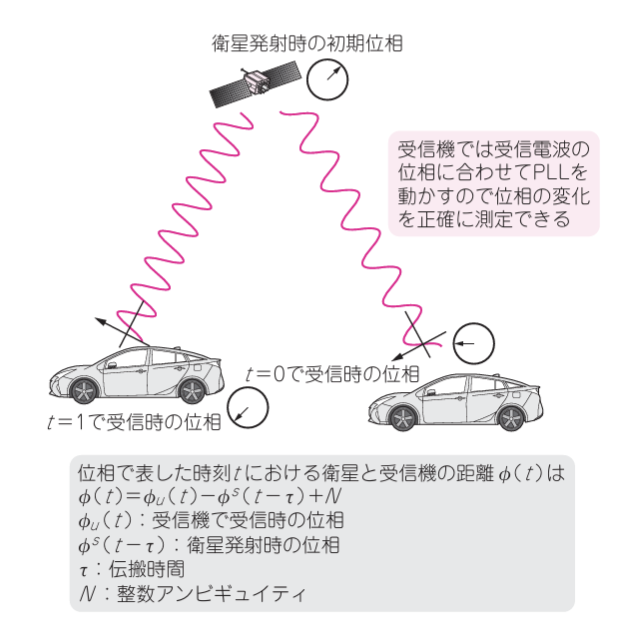
(画像元:整数アンビギュイティ。搬送波の波数の不確定性
少し深堀りして説明すると、RTK測位がFloat解とFix解に分かれる根本的な理由は、「整数アンビギュイティ」という概念にある。
整数アンビギュイティとは、衛星から受信機までの距離に含まれる搬送波の波数(サイクル数)の不確定性を指す。
 (画像元:トランジスタ技術2018年1月号 PDFより引用)
(画像元:トランジスタ技術2018年1月号 PDFより引用)搬送波の波長はL1帯で約19cmである。つまり、衛星と受信機の距離を測定するときに、「この距離には19cmの波がいくつ含まれているのか」という波数が、最初は不明なのだ。
Float解では、この波数が不明なまま、推定値で位置を計算している。一方、Fix解では、この波数が確定し、正しい整数値で距離が決まった状態なのである。
FloatからFixへ。RTK測位の初期化プロセス
複数時刻のデータ蓄積がFixを実現する
RTK測位を開始直後、受信機は衛星信号を捕捉し、複数の衛星からのデータを蓄積し始める。
Float解の状態では、搬送波の波数が不明なため、複数の候補値が存在する。
RTK演算エンジンは、時間とともに蓄積された信号データを統計的に解析し、各衛星の波数候補を徐々に絞り込んでいく。
複数時刻にわたるデータを連立により解析し、統計的に最も確からしい波数の組み合わせを決定するのだ。
複数周波数の活用によるFix時間の短縮
1周波(L1帯のみ)のRTK受信機では、搬送波の波数候補が多く、Fix解に到達するまでに時間がかかる。
対して、マルチバンド(2周波以上)のRTK受信機では、異なる波長の信号を組み合わせることで、波数の候補を飛躍的に減らすことができる。
例えば、L1帯とL2帯の2周波数を用いると、波長の異なる「物差し」で距離を重ね合わせることで、正しい波数が何かを迅速に特定できるのだ。マルチバンド受信機では、より高速にFix解へ到達できるとされている。
 (画像元:国土地理院 PDF「マルチGNSSを情報化施工に利用するための技術解説」P95より引用)
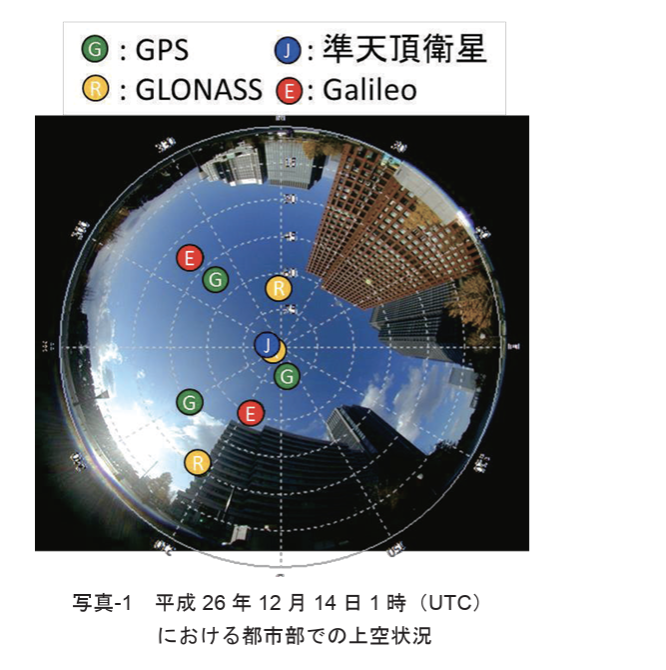
(画像元:国土地理院 PDF「マルチGNSSを情報化施工に利用するための技術解説」P95より引用)さらに、マルチGNSS対応(GPS、GLONASS、Galileo、みちびきなど複数の衛星システムを利用)により、利用可能な衛星数が増えることで、RTK測位の収束速度は加速される。
初期化時間と環境依存性
RTK測位において、Float解からFix解へ到達するまでの時間を「初期化時間」と呼ぶ。冒頭に上述した通り、障害物のない理想的な環境下で10~30秒程度とさえている。
ただし、この時間は環境に大きく依存する。衛星配置が良好で、電波環境が安定していれば、受信開始後数十秒でFix解に到達することが多い。
実装現場の実例では、ネットワークRTKの運用で「Fix状態に遷移するまでに数分~10分程度要する場合もある」と報告されている。
現場でのRTK運用ルール。Float状態での作業は厳禁
Fix状態を確認するまで、測量・墨出しを開始しないこの原則が、RTK測位の信頼性を支える大切なルールである。
Float解のままでは、精度が数十cm~1m程度であり、測量や構造物の墨出しには不十分だ。
実装現場では、以下のプロセスが遵守される必要がある。
- RTK受信機の電源投入
- 衛星信号の捕捉(通常、電源投入後数十秒~数分)
- Float解の状態で数十秒~数分待機
- 受信機の表示が「FIX」に変わったことを確認
- Fix状態が安定してから、初めて測量作業・墨出し作業を開始
この確認プロセスを省いて、Float状態のまま測量を開始することは、以降の施工全体に誤差を与える原因となる。
特に土木構造物の位置出しや基準点設定では、数cm単位の精度が求められるため、Float状態での作業は許容されない。
Fix状態の維持がRTK測位の生命線
一度Fix解を得られても、その状態の維持が重要である。
実装現場の事例では、以下のような条件下でFix状態が崩れることが報告されている。
- トンネルや地下構造物への進入時
- 高架道路の直下での走行
- 強力な電波干渉源(高圧線直下など)の近くでの作業
これらの環境で一時的にFix状態から低下した場合は、当該場所から脱出して、空が開けた環境に移動し、再度Fix解を確立する必要がある。
移動体でRTK測位を行う場合、Fix状態のまま移動していれば数cm精度を維持できるが、Fix状態が崩れた時点で精度は大幅に低下する。
ミスFixと基線長の影響。RTK測位の信頼性限界
ミスFix。正しく見えても誤った波数で固定
Fix解に見えても、実は誤った波数で固定されている「ミスFix」という状態が存在する可能性がある。
ミスFixが発生した場合、受信機の表示は正常な「FIX」状態に見えるが、実際には数十cm~数mの誤差が隠れている。
視覚的には判別が難しいため、特に基線長が長い場合に発生する可能性が高い。
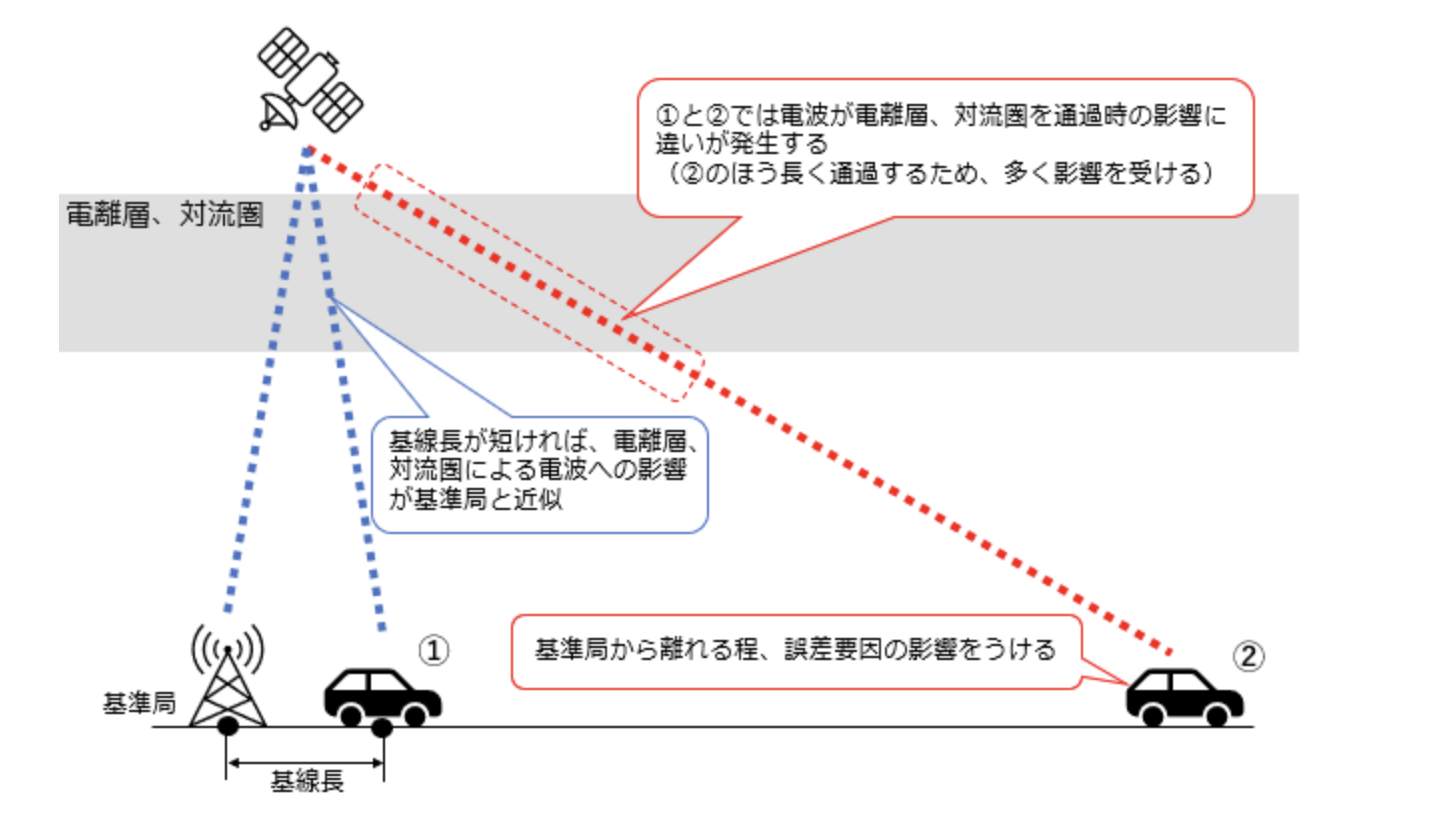 (画像元:株式会社ジェノバ「基線長が長いとどうなるか」WEBページより引用)
(画像元:株式会社ジェノバ「基線長が長いとどうなるか」WEBページより引用)RTK測位では、基準局と移動局の距離(基線長)が長くなるほど、Fix解を得るのが難しくなり、精度も劣化する傾向がある。
マルチバンドRTKと単周波RTKの基線長特性の違い
マルチバンド対応のRTK受信機では、より長い基線長でも比較的安定したFix解が得られるとされている。
ただし、基線長の増加に応じてばらつきが大きくなるため、超長距離基線でのRTK測位には、測位後の精度検証が不可欠である。
RTK測位を実装する際は、基準局の配置と基線長を計画する必要がある。理想的には、移動局と基準局の距離を10km以内に収めることが推奨される。
これにより、ミスFixのリスクを低減し、安定したFix解を確保できるのだ。
【実践編】3周波GNSSでFIXも速い!「スマホ測量アプリOPTiM Geo Scan」という選択肢
マルチバンド(2周波以上)の受信機を活用することでFIX時間が短縮されるということは前述したが、今、急速に土木や建設、インフラの現場で導入が進んでいるのが、3周波対応の高性能GNSSレシーバーとスマホを組み合わせたソリューション「OPTiM Geo Scan」だ。
 (画像:Geo Scanで活用する高性能GNSSレシーバー /撮影:砂田耕希)
(画像:Geo Scanで活用する高性能GNSSレシーバー /撮影:砂田耕希)OPTiM Geo Scanで使用する「高性能タイプ」のレシーバーは、3周波解析に対応している。
- 上空が木々で覆われた山間部: 2周波ではFixしにくい森林の現場でも、L5信号を含む3周波を活用することで解析能力が向上し、より安定した「高Fix」を実現
- 高層ビルが立ち並ぶ都市部: マルチパス(反射波)の影響を受けやすいビル街でも、3周波とマルチGNSSの組み合わせにより、測位率を大幅に拡張

この高性能レシーバーは公共測量にも利用可能だ。さらに、バッテリー持続時間は約20時間(標準添付)と、長時間の現場作業にも耐えうる仕様となっている。
「マルチバンドタイプの受信機が良いのはわかったが、機材はどうすればいいのだろう?」と迷った場合、こうした3周波対応GNSSレシーバーを活用する高精度スマホ測量を活用することが、現実的な解となるだろう。
高精度スマホ測量「Geo Scan」の限定《無料》資料を▼今すぐダウンロード▼ しよう!
WRITTEN by



建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします