コラム・特集
SLAMとは?〜 LiDAR測量でもよく聞くSLAMについて解説 〜 【測量のことイチから解説】

ICT機器での測量が普及するのにともない、SLAMという言葉をよく聞くようになった。本記事では、SLAMの基本概念、仕組み、応用例についてやさしく解説していく。
SLAMとは、「Simultaneous Localization and Mapping」の略。これを日本語にすると「Simultaneous=同時に起こる」「Localization=位置特定」「Mapping=地図作成」となり、「位置特定と地図作成を同時に行う」という意味になる。
 (画像:Shutterstock)
(画像:Shutterstock)
移動するロボットや車両が、自分の位置を推定しながら周囲の環境の地図を作成する技術である。SLAMは、GPSが使用できない屋内環境や地下、都市部などで特に有効である。
SLAM技術の研究は1980年代に始まり、ロボティクスやコンピュータービジョンの分野で進展してきた。
初期のSLAM研究は、主に理論的な枠組みの確立に焦点を当てていた。これにより、ロボットが未知の環境を探索しながら自己位置を推定し、地図を作成するという基本が定義された。
初期の研究
1980年代後半から1990年代にかけて、SLAMの初期研究が行われた。この時期の研究は、主にロボット工学者と計算機科学者によって推進された。初期のSLAMシステムは、単純な環境で動作し、制約の多い条件下での試験的かつ限定的な成功を収めた。
技術の進展
2000年代に入ると、センサー技術や計算機能力の向上により、SLAM技術も大きく進化。LiDARや高解像度カメラの普及により、より複雑な環境での精度が向上し、実用的な応用が可能となった。また、アルゴリズムの改良も進み、EKF-SLAMやParticle Filter SLAMなどの高度な手法が開発された。
現代のSLAM
現在では、SLAM技術は広範な応用がなされている。自動運転、ドローン、ロボット掃除機、さらには拡張現実(AR)や仮想現実(VR)分野でも利用されている。ディープラーニングやクラウドコンピューティングの導入により、SLAMシステムはますます高精度かつリアルタイムで動作するようになっている。
SLAMの仕組みは、主に以下の要素で構成されている。
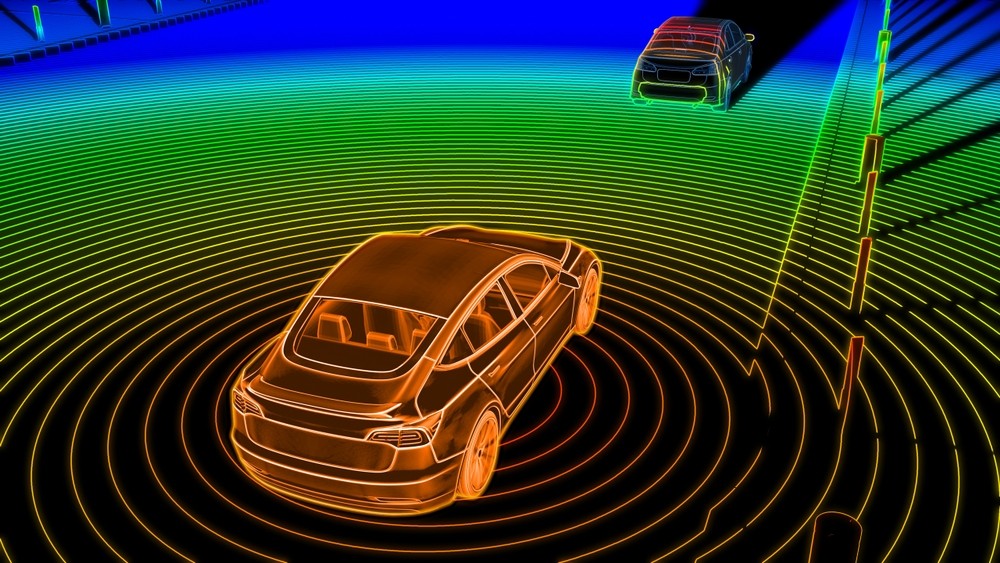
SLAMシステムは、LiDAR(Light Detection and Ranging)、カメラ、IMU(Inertial Measurement Unit)などのセンサーを使用して外部の環境情報を取得する。これらのセンサーから得られるデータをもとに、自己位置と地図を同時に更新する。
SLAMのアルゴリズムは、センサーから得られるデータを処理し、自己位置推定と地図の作成を行う。
 (画像:Shutterstock)
(画像:Shutterstock)
代表的なアルゴリズムには、EKF-SLAM(Extended Kalman Filter SLAM)、Graph-Based SLAM、Particle Filter SLAMなどがある。
SLAMは様々な分野で応用されている。以下に代表的な例を紹介する。
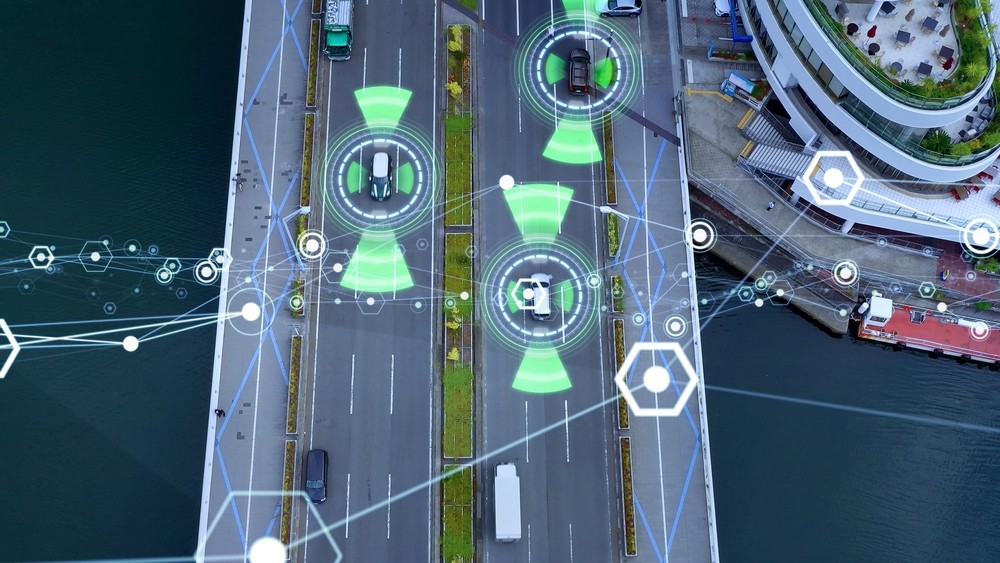
自律走行車は、SLAM技術を用いて自己位置を把握し、周囲環境を認識しながら安全に移動する。これにより、GPSが使用できない環境でも正確なナビゲーションが可能となる。
 (画像:Shutterstock)
(画像:Shutterstock)
ドローンは、SLAMを使用して自己位置を推定しながら空中を移動し、災害現場のマッピングや農業現場の監視などに利用されている。SLAMによる高精度な地図作成が、ドローンの効率的な運用を支えている。
室内環境でのお掃除ロボットや物流ロボットなどもSLAMを活用している。これにより、ロボットは障害物を避けながら効率的に作業を行うことができる。
 (画像:Shutterstock)
(画像:Shutterstock)
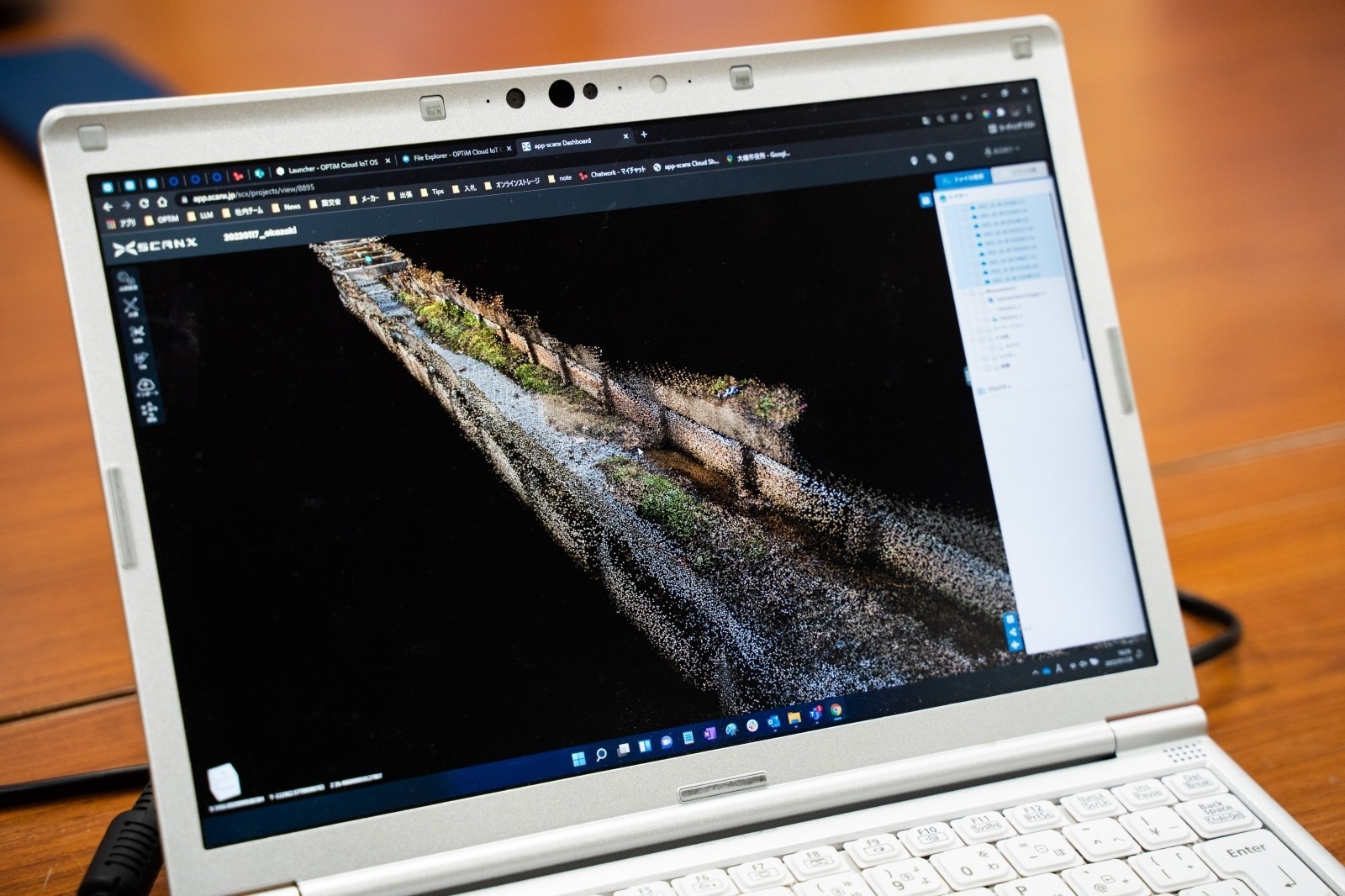
測量機器におけるSLAMの応用は、特に注目されている。従来の測量方法に比べて、SLAMを使用することでより迅速かつ高精度な測量が可能となっている。建築や土木・建設、インフラの現場での地形データの取得にSLAM技術が活躍しているのだ。
SLAM技術には多くのメリットがある一方で、いくつかのデメリットも存在する。
メリット
デメリット
SLAM技術は、日々進化している。例えばLLMを用いたSLAMの精度向上や、クラウドベースのSLAMシステムなどが開発されている。
これにより、より複雑な環境での使用や、大規模なデータ処理が可能となる。
生成AI/大規模言語モデルを活用することで、センサーから得られるデータの処理能力が大幅に向上し、SLAMの精度がさらに高まる。これにより、より詳細な地図作成や、複雑な環境での自己位置推定が可能となる。
クラウドベースのSLAMシステムは、大量のデータをクラウド上で処理することで、リアルタイムでの地図作成や位置推定が可能となる。これにより、現場でのデータ処理負荷が軽減され、効率的な運用が可能となる。
SLAMには使用するセンサーによって、いくつかの種類が存在する。それぞれの特徴について詳しく見ていこう。
SLAMには使用するセンサーによって、いくつかの種類が存在する。それぞれの特徴について詳しく見ていこう。
LiDAR SLAMは、LiDAR(レーザースキャナ)から取得したデータによって実現するSLAM技術である。
LiDARは、距離を高精度で測定し、3Dマップを作成するのに適している。しかし、LiDARは高価であり周囲に障害物が少ない環境ではデータ取得が難しいという課題がある。
Visual SLAMは、カメラからの画像データを用いて実現するSLAM技術だ。カメラはコストが低く、色・形状の情報を取得できるため、さまざまな場面で利用されている。しかし、暗所や特徴点の少ない環境では精度が低下する可能性がある。
Depth SLAMは、深度カメラやToF(Time of Flight)センサーからの距離情報を用いて実現するSLAM技術である。Visual SLAMの弱点である暗所でも使用可能であり、特徴点の少ない環境でも高精度なマップを生成することができる。
iPhone搭載のLiDARで高精度な測量を実現!
今、土木・建設、建築、インフラの現場で活躍しているのが、LiDAR SLAMを活用した測量アプリ「OPTiM Geo Scan」だ。
このスマホ測量アプリはiPhoneにデフォルトで搭載されているLiDARセンサーを活用して測量を行う。
 (画像:Shutterstock)
(画像:Shutterstock)
しかもその使い勝手は優れもので、測量士/測量士補などの専門の知識はいっさい不要。数十分使い方のレクチャーさえ受ければ、誰でも簡単に、ひとり測量が行える測量アプリなのだ。直感的な操作だから、サクサク進む。
「アプリだから精度が厳しいんじゃないの?」と懐疑的な目を向けている方もご安心あれ。


測位精度は、令和4年度の国土交通省 「3次元計測技術を用いた出来形管理要領(案)」にも準拠していることから、「出来形測量」「起工測量」でも使用することができる。つまり、出来形管理計測に利用するため必要な高い精度(±50mm)を実現しているのだ。
もし気になる業界関係者の方は以下の資料請求ボタンから無料資料をダウンロードしてみてほしい。
SLAMとは?
SLAMとは、「Simultaneous Localization and Mapping」の略。これを日本語にすると「Simultaneous=同時に起こる」「Localization=位置特定」「Mapping=地図作成」となり、「位置特定と地図作成を同時に行う」という意味になる。
(画像:Shutterstock)移動するロボットや車両が、自分の位置を推定しながら周囲の環境の地図を作成する技術である。SLAMは、GPSが使用できない屋内環境や地下、都市部などで特に有効である。
SLAMの歴史
SLAM技術の研究は1980年代に始まり、ロボティクスやコンピュータービジョンの分野で進展してきた。
初期のSLAM研究は、主に理論的な枠組みの確立に焦点を当てていた。これにより、ロボットが未知の環境を探索しながら自己位置を推定し、地図を作成するという基本が定義された。
初期の研究
1980年代後半から1990年代にかけて、SLAMの初期研究が行われた。この時期の研究は、主にロボット工学者と計算機科学者によって推進された。初期のSLAMシステムは、単純な環境で動作し、制約の多い条件下での試験的かつ限定的な成功を収めた。
技術の進展
2000年代に入ると、センサー技術や計算機能力の向上により、SLAM技術も大きく進化。LiDARや高解像度カメラの普及により、より複雑な環境での精度が向上し、実用的な応用が可能となった。また、アルゴリズムの改良も進み、EKF-SLAMやParticle Filter SLAMなどの高度な手法が開発された。
現代のSLAM
現在では、SLAM技術は広範な応用がなされている。自動運転、ドローン、ロボット掃除機、さらには拡張現実(AR)や仮想現実(VR)分野でも利用されている。ディープラーニングやクラウドコンピューティングの導入により、SLAMシステムはますます高精度かつリアルタイムで動作するようになっている。
SLAMの仕組みとは?
SLAMの仕組みは、主に以下の要素で構成されている。
センサー技術
SLAMシステムは、LiDAR(Light Detection and Ranging)、カメラ、IMU(Inertial Measurement Unit)などのセンサーを使用して外部の環境情報を取得する。これらのセンサーから得られるデータをもとに、自己位置と地図を同時に更新する。
- LiDAR: レーザー光を用いて距離を測定し、環境の3Dマップを作成する。
- カメラ:視覚情報を取得し、画像処理技術で環境を認識する。
- IMU:加速度や角速度を測定し、移動の変化を捉える。
SLAMのアルゴリズム
SLAMのアルゴリズムは、センサーから得られるデータを処理し、自己位置推定と地図の作成を行う。
(画像:Shutterstock)代表的なアルゴリズムには、EKF-SLAM(Extended Kalman Filter SLAM)、Graph-Based SLAM、Particle Filter SLAMなどがある。
- EKF-SLAM:カルマンフィルターを用いて自己位置と地図を推定する方法
- Graph-Based SLAM:環境をグラフ構造で表現し、最適化を行う方法
- Particle Filter SLAM:パーティクルフィルターを用いて複数の位置候補を評価する方法。
SLAMの活用例を紹介
SLAMは様々な分野で応用されている。以下に代表的な例を紹介する。
自律走行車
自律走行車は、SLAM技術を用いて自己位置を把握し、周囲環境を認識しながら安全に移動する。これにより、GPSが使用できない環境でも正確なナビゲーションが可能となる。
(画像:Shutterstock)ドローン
ドローンは、SLAMを使用して自己位置を推定しながら空中を移動し、災害現場のマッピングや農業現場の監視などに利用されている。SLAMによる高精度な地図作成が、ドローンの効率的な運用を支えている。
ロボティクス
室内環境でのお掃除ロボットや物流ロボットなどもSLAMを活用している。これにより、ロボットは障害物を避けながら効率的に作業を行うことができる。
(画像:Shutterstock)測量機器
測量機器におけるSLAMの応用は、特に注目されている。従来の測量方法に比べて、SLAMを使用することでより迅速かつ高精度な測量が可能となっている。建築や土木・建設、インフラの現場での地形データの取得にSLAM技術が活躍しているのだ。
SLAMのメリットとデメリット
SLAM技術には多くのメリットがある一方で、いくつかのデメリットも存在する。
メリット
- 高精度な位置推定:SLAMは高精度な自己位置推定を実現する
- リアルタイム処理::環境変化にリアルタイムで対応可能
- GPS不要:GPSが利用できない環境でも自己位置推定が可能
デメリット
- 計算コスト:高精度な処理には高い計算能力が必要
- センサー依存:センサーの性能に依存するため、センサー故障時に精度が低下する可能性がある
- 環境依存:複雑な環境や動的な環境では精度が低下する可能性
SLAMの最新技術とこれから
SLAM技術は、日々進化している。例えばLLMを用いたSLAMの精度向上や、クラウドベースのSLAMシステムなどが開発されている。
これにより、より複雑な環境での使用や、大規模なデータ処理が可能となる。
LLM(大規模言語モデル)の活用
生成AI/大規模言語モデルを活用することで、センサーから得られるデータの処理能力が大幅に向上し、SLAMの精度がさらに高まる。これにより、より詳細な地図作成や、複雑な環境での自己位置推定が可能となる。
クラウドベースのSLAM
クラウドベースのSLAMシステムは、大量のデータをクラウド上で処理することで、リアルタイムでの地図作成や位置推定が可能となる。これにより、現場でのデータ処理負荷が軽減され、効率的な運用が可能となる。
SLAMの種類にはなにがある?
SLAMには使用するセンサーによって、いくつかの種類が存在する。それぞれの特徴について詳しく見ていこう。
SLAMには使用するセンサーによって、いくつかの種類が存在する。それぞれの特徴について詳しく見ていこう。
LiDAR SLAM
LiDAR SLAMは、LiDAR(レーザースキャナ)から取得したデータによって実現するSLAM技術である。
LiDARは、距離を高精度で測定し、3Dマップを作成するのに適している。しかし、LiDARは高価であり周囲に障害物が少ない環境ではデータ取得が難しいという課題がある。
Visual SLAM
Visual SLAMは、カメラからの画像データを用いて実現するSLAM技術だ。カメラはコストが低く、色・形状の情報を取得できるため、さまざまな場面で利用されている。しかし、暗所や特徴点の少ない環境では精度が低下する可能性がある。
Depth SLAM
Depth SLAMは、深度カメラやToF(Time of Flight)センサーからの距離情報を用いて実現するSLAM技術である。Visual SLAMの弱点である暗所でも使用可能であり、特徴点の少ない環境でも高精度なマップを生成することができる。
iPhone搭載のLiDARで高精度な測量を実現!
誰でも簡単にひとり測量ができるアプリ「OPTiM Geo Scan」を知っていますか?
今、土木・建設、建築、インフラの現場で活躍しているのが、LiDAR SLAMを活用した測量アプリ「OPTiM Geo Scan」だ。このスマホ測量アプリはiPhoneにデフォルトで搭載されているLiDARセンサーを活用して測量を行う。
(画像:Shutterstock)「アプリだから精度が厳しいんじゃないの?」と懐疑的な目を向けている方もご安心あれ。
測位精度は、令和4年度の国土交通省 「3次元計測技術を用いた出来形管理要領(案)」にも準拠していることから、「出来形測量」「起工測量」でも使用することができる。つまり、出来形管理計測に利用するため必要な高い精度(±50mm)を実現しているのだ。
もし気になる業界関係者の方は以下の資料請求ボタンから無料資料をダウンロードしてみてほしい。

WRITTEN by



建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします