ニュース
戸田建設、覆工セントルのレール移動作業を完全自動化
戸田建設(株)と岐阜工業(株)は、覆工セントルのレール移動を自動化する「Rail Walker SystemⅡ」を開発したと発表した。このシステムは、従来、バックホウなどの建設機械と複数の作業員との混在作業で行っていた覆工セントルのレール移動作業を、僅か一人の作業員のボタン操作だけで自動化するもの。
本システムの開発により防水工、鉄筋工、覆工コンクリート工の一連作業において、レール移動作業がすべて自動で行えるため、生産性、安全性が飛躍的に向上するという。
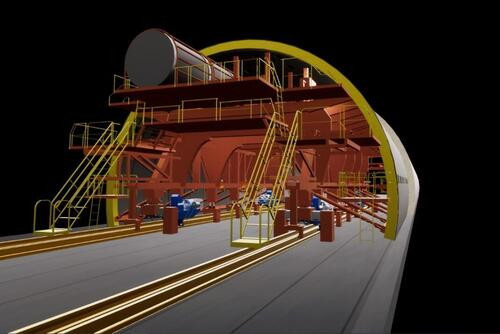
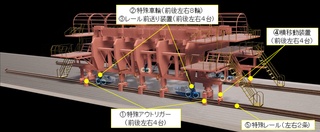
 Rail Walker SystemⅡ システム全体イメージ図
Rail Walker SystemⅡ システム全体イメージ図
本システムは、①油圧シリンダ式特殊アウトリガー、②自走装置付き特殊車輪、③ラックアンドピニオン方式※によるレール前送り装置、④油圧シリンダ式横移動装置、⑤架台付き特殊レールから構成されている。
特殊アウトリガーで覆工セントルと特殊レールを上昇させ、レール前送り装置でレールをセントル進行方向に移動。トンネル線形が曲線の場合は曲線形状に合わせて横移動装置によりレール前後で左右の移動調整を行う(図-4参照)。
(※ラックアンドピニオン(rack and pinion)とは歯車の一種で、回転力を直線の動きに変換する方式。円形歯車(ピニオン)と、平板状の棒に歯がつけられたラックを組み合わせたもの。ピニオンに回転力を加えると、ラックが歯すじ設定された末端まで水平方向に動く。)
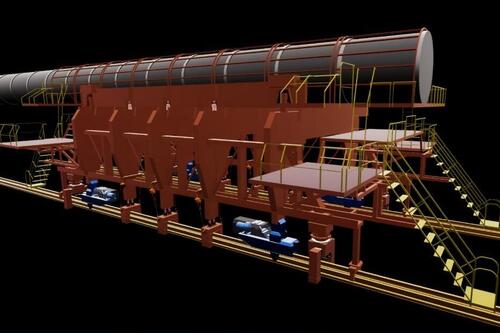
 システム概要図
システム概要図
 レール前送り装置詳細図(ラックアンドピニオン方式)
レール前送り装置詳細図(ラックアンドピニオン方式)
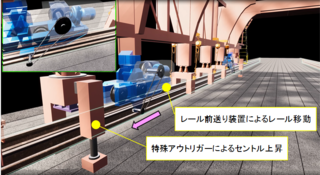
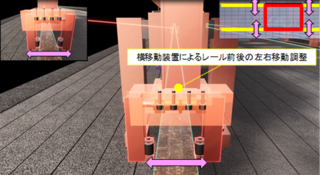 レール移動方法概要図
レール移動方法概要図
本システムを採用することで、重機類を使用することなく、コントローラーを持った1名の作業員が遠隔でレール前進と横移動を行うことができるため、ずり搬出中の通過車両の往来が激しい時でもレールを安全に移動させることができる。
先に開発した「Rail Walker System」と本システムを併せて使用することで、防水工、鉄筋工、覆工コンクリート工の一連作業において、レール移動作業がすべて自動で行えるため、トンネル掘削作業やインバートコンクリート作業時の通行車両を停車させることなく、トンネル全作業の効率化、安全性の向上が図れる。
「Rail Walker SystemⅡ」は、現在施工中の当社トンネル現場で使用予定。なお、本システムは特殊ジャッキを使用したラックアンドピニオン方式を採用しているが、今後の幅広い需要に対応するため、より安価な汎用品の油圧ジャッキとウィンチを使用した牽引方式の移動システムも開発中(特許出願中)だという。
本システムの開発により防水工、鉄筋工、覆工コンクリート工の一連作業において、レール移動作業がすべて自動で行えるため、生産性、安全性が飛躍的に向上するという。
Rail Walker SystemⅡ システム全体イメージ図本システムは、①油圧シリンダ式特殊アウトリガー、②自走装置付き特殊車輪、③ラックアンドピニオン方式※によるレール前送り装置、④油圧シリンダ式横移動装置、⑤架台付き特殊レールから構成されている。
特殊アウトリガーで覆工セントルと特殊レールを上昇させ、レール前送り装置でレールをセントル進行方向に移動。トンネル線形が曲線の場合は曲線形状に合わせて横移動装置によりレール前後で左右の移動調整を行う(図-4参照)。
(※ラックアンドピニオン(rack and pinion)とは歯車の一種で、回転力を直線の動きに変換する方式。円形歯車(ピニオン)と、平板状の棒に歯がつけられたラックを組み合わせたもの。ピニオンに回転力を加えると、ラックが歯すじ設定された末端まで水平方向に動く。)
システム概要図レール前送り装置詳細図(ラックアンドピニオン方式)レール移動方法概要図本システムを採用することで、重機類を使用することなく、コントローラーを持った1名の作業員が遠隔でレール前進と横移動を行うことができるため、ずり搬出中の通過車両の往来が激しい時でもレールを安全に移動させることができる。
先に開発した「Rail Walker System」と本システムを併せて使用することで、防水工、鉄筋工、覆工コンクリート工の一連作業において、レール移動作業がすべて自動で行えるため、トンネル掘削作業やインバートコンクリート作業時の通行車両を停車させることなく、トンネル全作業の効率化、安全性の向上が図れる。
「Rail Walker SystemⅡ」は、現在施工中の当社トンネル現場で使用予定。なお、本システムは特殊ジャッキを使用したラックアンドピニオン方式を採用しているが、今後の幅広い需要に対応するため、より安価な汎用品の油圧ジャッキとウィンチを使用した牽引方式の移動システムも開発中(特許出願中)だという。
WRITTEN by

建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします