西松建設はジオマシンエンジニアリングとアラヤとの共同で、山岳トンネル施工における一次ずり搬出作業に使用する「ホイールローダ」と「バックホウ」の自動施工システムを開発し、実証に成功したと発表した。
今回開発された自動施工システムは、山岳トンネル無人化・自動化施工システム『Tunnel RemOS(トンネルリモス)』の一環として開発されたものである。
西松建設はこれまで、オペレータが重機に搭乗せずに遠隔操作する技術(遠隔施工)の開発を中心に進めてきた。
この技術により作業従事者の切羽への立ち入りを排除することで、切羽作業を無人化し、現場の安全性を向上させてきた実績がある。
今回の自動化施工技術は、これまでの遠隔施工技術をベースとして、ホイールローダとバックホウの運転とずりのすくい上げといった一連のずり出し作業における動作を自動化するものだ。
この技術の導入により、オペレータの削減による省人化と、オペレータの操作技量に左右されない安定した施工が可能になると期待されている。
開発された自動施工技術は、作業状況に応じて自動化施工モードと遠隔施工モードを柔軟に切り替えることができる設計となっており、それぞれの技術特性を最大限に活用した実用的な施工が可能だ。
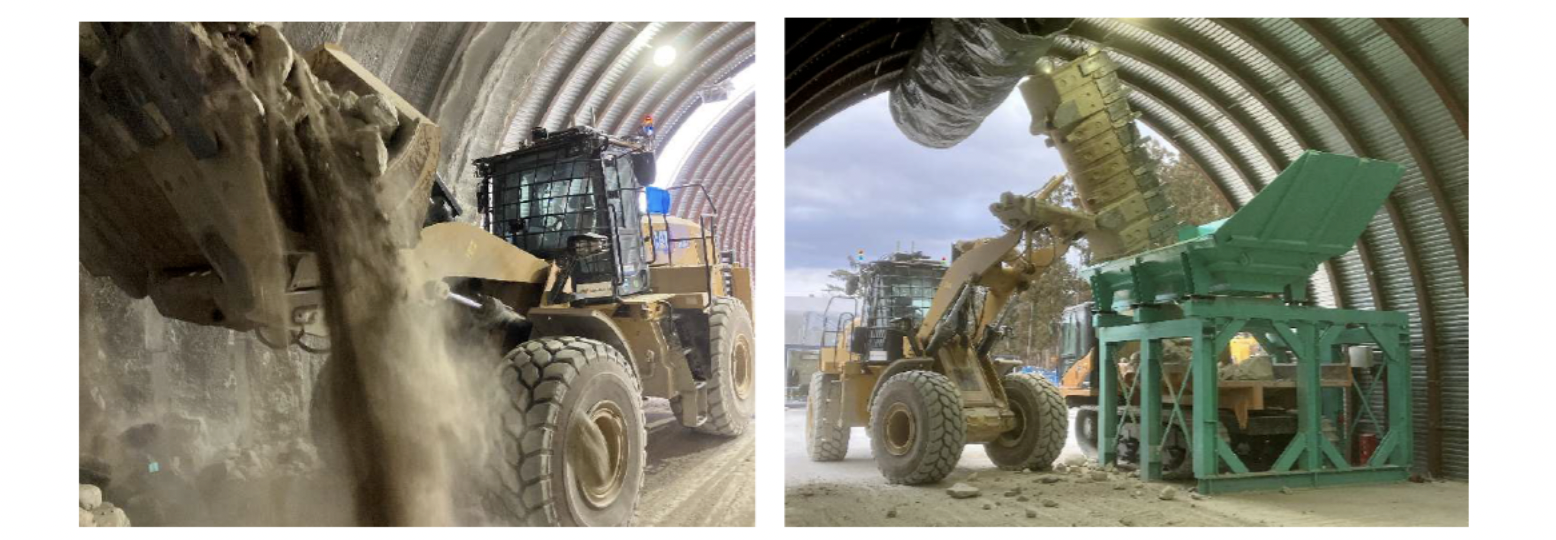
ホイールローダの自動施工技術では、ずり出しにおける一連の走行動作・バケット動作を自動で行うことができる。
すくい上げるずりの対象は、予め制御プログラム上で設定した走行レーン(切羽の左側・中央・右側など)によって管理され、遠隔コクピットに配置した制御プログラム操作端末で任意に指定することが可能だ。
これにより、オペレータはすくい上げるずりの位置に応じて走行レーンを選択するだけで、あとはホイールローダが指令に応じた走行レーンにおけるずり出しの一連動作を自動で実施する。
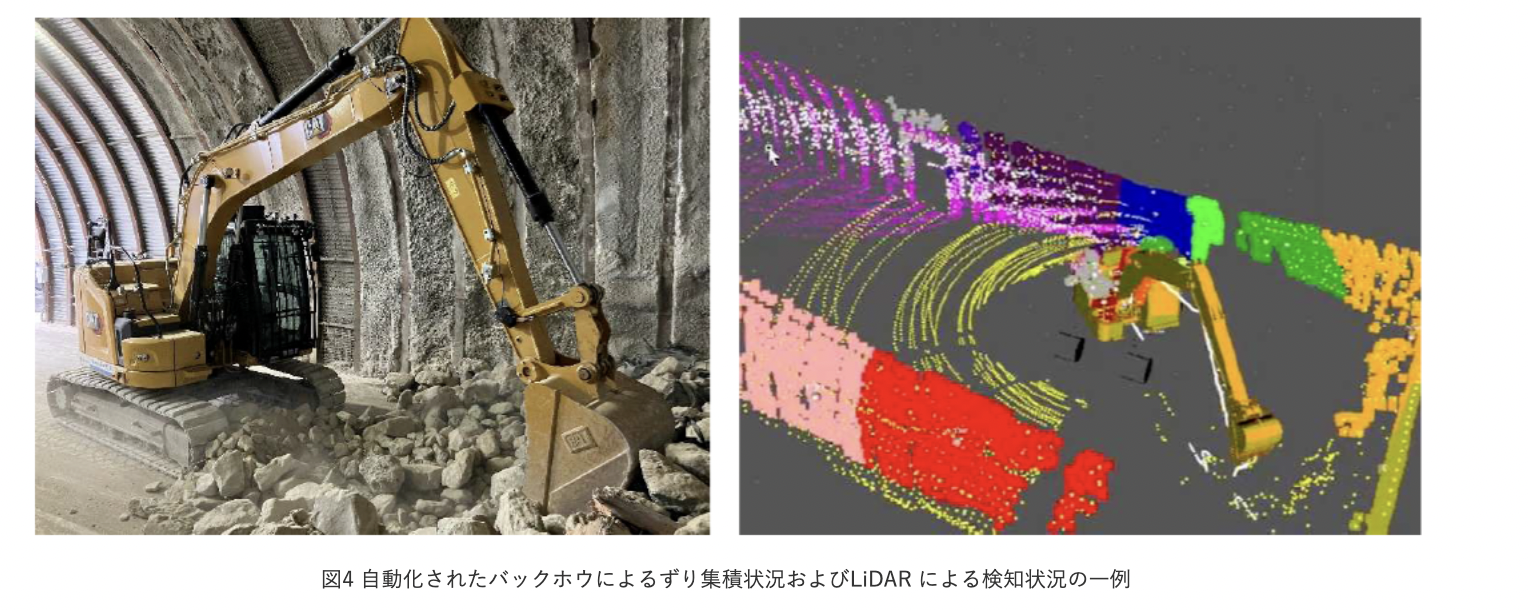
一方、バックホウの自動施工技術では、駐機場所から切羽までの走行と、切羽でのずり集積作業を自動化した。
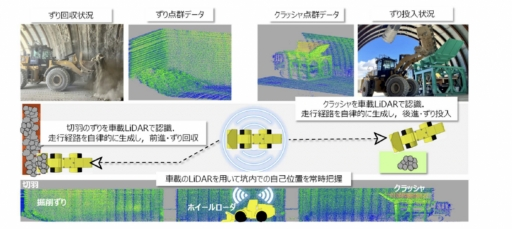
走行の自動化においては、機体に搭載した複数のセンサを用いてSLAM等により周囲の環境(壁面・障害物)を検知し、側壁との距離を一定に保ちながら駐機場所と切羽の間を自動運転する。
切羽でのずり集積作業では、ずりの形状を認識しながら、機体のブーム・アーム・バケットの各関節の角度を制御してずりをすくい上げ、ホイールローダがすくい易い位置まで旋回してずりを集積する。
また安全面では、作業中にホイールローダの接近を検知した場合には旋回範囲を制限することで衝突を防止する機能を搭載しており、両重機による狭隘な切羽での同時作業において、安全性を確保した自動化施工が実現している。
実証実験は、西松建設の山岳トンネル技術開発拠点『N-フィールド』(栃木県那須塩原市)にて、ずりやクラッシャーをリアルに再現した模擬トンネルを用いて実施された。
西松建設は今後、ホイールローダとバックホウの自動化施工技術の高度化を目指すとともに、ずり出しと同時にコソク・あたり取り作業に用いられるブレーカについても自動化施工技術の構築・適用を進める方針だ。
将来的には山岳トンネル施工で使用する重機全般にも自動化施工技術を開発・適用して『Tunnel RemOS』の構築を進め、切羽作業の完全無人化の実現を目指すとしている。
自動運転と遠隔操作を柔軟に切り替え可能な『Tunnel RemOS』システムで切羽作業の完全無人化を目指す
今回開発された自動施工システムは、山岳トンネル無人化・自動化施工システム『Tunnel RemOS(トンネルリモス)』の一環として開発されたものである。
西松建設はこれまで、オペレータが重機に搭乗せずに遠隔操作する技術(遠隔施工)の開発を中心に進めてきた。
この技術により作業従事者の切羽への立ち入りを排除することで、切羽作業を無人化し、現場の安全性を向上させてきた実績がある。
今回の自動化施工技術は、これまでの遠隔施工技術をベースとして、ホイールローダとバックホウの運転とずりのすくい上げといった一連のずり出し作業における動作を自動化するものだ。
この技術の導入により、オペレータの削減による省人化と、オペレータの操作技量に左右されない安定した施工が可能になると期待されている。
開発された自動施工技術は、作業状況に応じて自動化施工モードと遠隔施工モードを柔軟に切り替えることができる設計となっており、それぞれの技術特性を最大限に活用した実用的な施工が可能だ。
ホイールローダの自動施工技術では、ずり出しにおける一連の走行動作・バケット動作を自動で行うことができる。
すくい上げるずりの対象は、予め制御プログラム上で設定した走行レーン(切羽の左側・中央・右側など)によって管理され、遠隔コクピットに配置した制御プログラム操作端末で任意に指定することが可能だ。
これにより、オペレータはすくい上げるずりの位置に応じて走行レーンを選択するだけで、あとはホイールローダが指令に応じた走行レーンにおけるずり出しの一連動作を自動で実施する。
一方、バックホウの自動施工技術では、駐機場所から切羽までの走行と、切羽でのずり集積作業を自動化した。
走行の自動化においては、機体に搭載した複数のセンサを用いてSLAM等により周囲の環境(壁面・障害物)を検知し、側壁との距離を一定に保ちながら駐機場所と切羽の間を自動運転する。
切羽でのずり集積作業では、ずりの形状を認識しながら、機体のブーム・アーム・バケットの各関節の角度を制御してずりをすくい上げ、ホイールローダがすくい易い位置まで旋回してずりを集積する。
また安全面では、作業中にホイールローダの接近を検知した場合には旋回範囲を制限することで衝突を防止する機能を搭載しており、両重機による狭隘な切羽での同時作業において、安全性を確保した自動化施工が実現している。
実証実験は、西松建設の山岳トンネル技術開発拠点『N-フィールド』(栃木県那須塩原市)にて、ずりやクラッシャーをリアルに再現した模擬トンネルを用いて実施された。
西松建設は今後、ホイールローダとバックホウの自動化施工技術の高度化を目指すとともに、ずり出しと同時にコソク・あたり取り作業に用いられるブレーカについても自動化施工技術の構築・適用を進める方針だ。
将来的には山岳トンネル施工で使用する重機全般にも自動化施工技術を開発・適用して『Tunnel RemOS』の構築を進め、切羽作業の完全無人化の実現を目指すとしている。
WRITTEN by

建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします