

竹中工務店を代表法人とする海床ロボットコンソーシアムは6月18日から20日まで、大阪城公園東外堀で都市型自動運転船「海床ロボット」の4回目となる実証実験を実施した。
水中・水面の環境データを航行制御に活用する安全な自動運航システムの実現可能性を検証する内容となった。
「海床ロボット」は純国産制御システムを搭載し、3メートル四方の床が海や運河・河川、湖沼などの水面を自動航行して離着岸を行う自動運転船である。
今回の実証実験では航行制御に必要な水域情報の可視化をテーマとして3つの実験を実施した。
実験1では超小型水上ドローン「海床ロボットMINI」と「MICRO」を使用し、水中および水面の障害物の有無や水質を撮影してリアルタイムで取得した情報の航行制御への活用可能性を検証した。

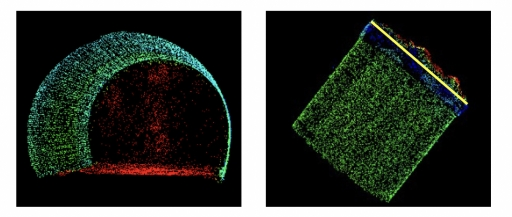
実験2では東陽テクニカの協力のもと、海床ロボットにマルチビームソナーを取り付けて水底をスキャンし、水深マップを作成することで水深情報を踏まえた航路設定の有効性を確認している。
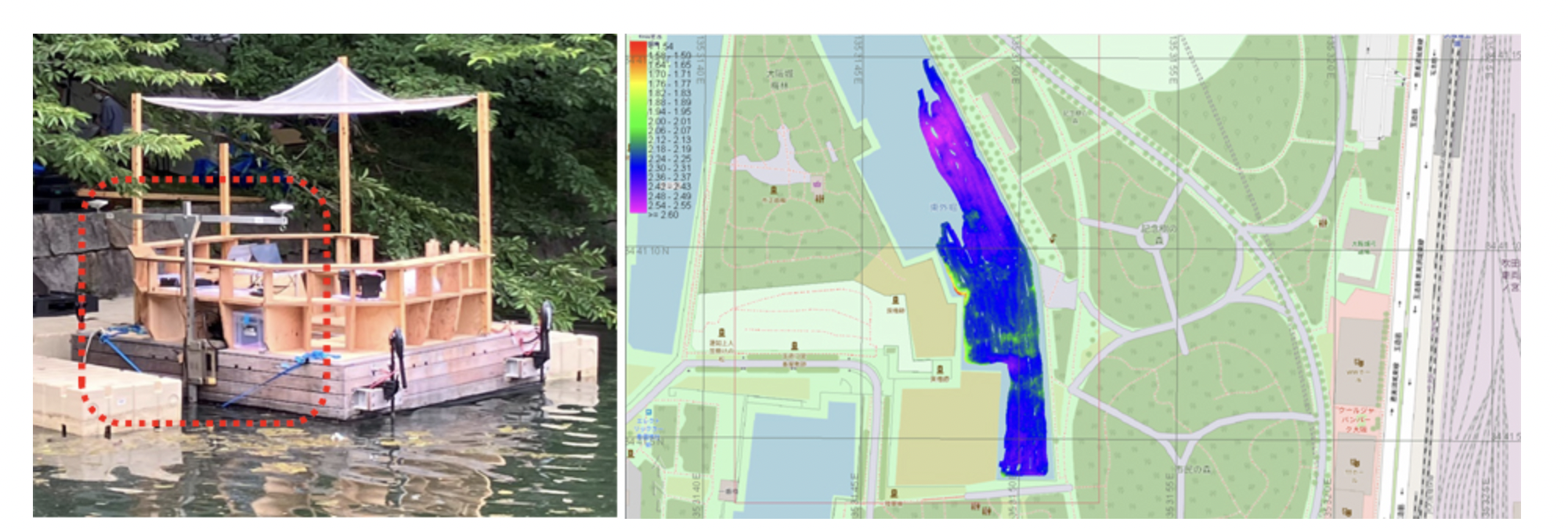 (マルチビームソナーの装置(赤枠)とスキャンして作成した水深マップ)
(マルチビームソナーの装置(赤枠)とスキャンして作成した水深マップ)
実験3ではハイパーデジタルツインの協力により陸側にLiDARセンサを設置し、海床ロボットの正確な位置情報を補足して航行制御に活用するための検証を行った。
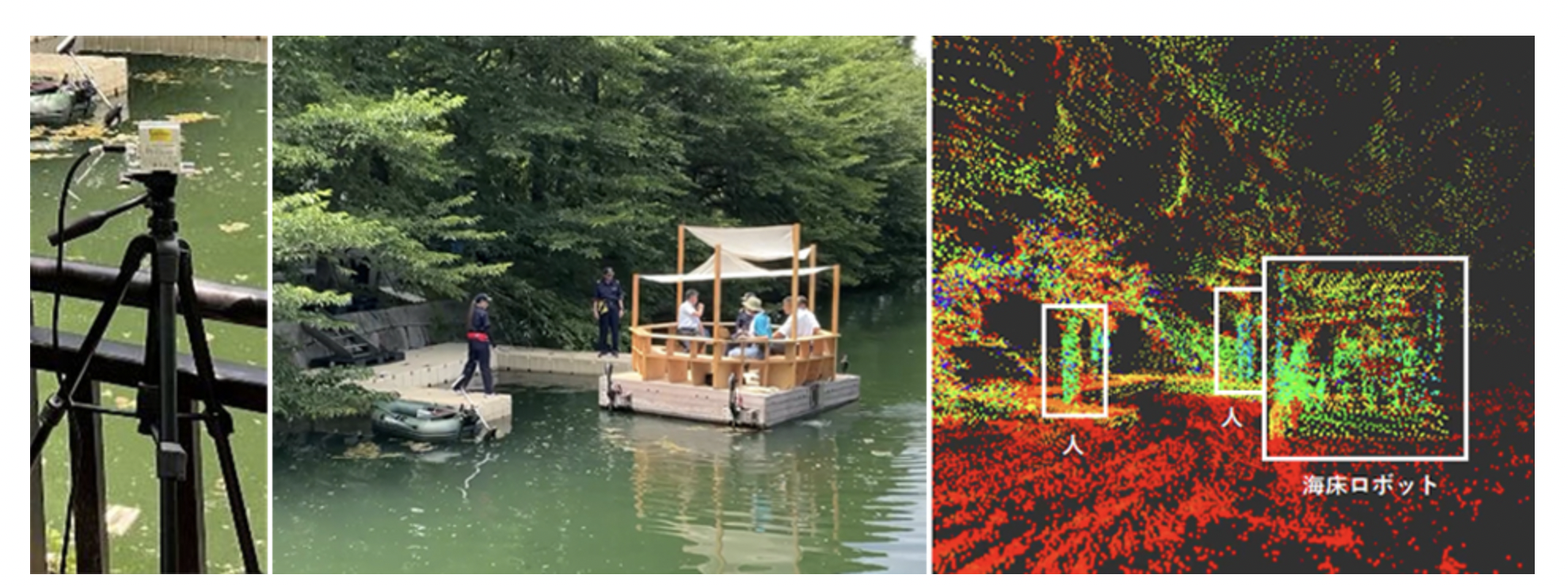 (左:陸側に設置したLiDARセンサ/中央:カメラデータ(参考)/右:LiDARデータ)
(左:陸側に設置したLiDARセンサ/中央:カメラデータ(参考)/右:LiDARデータ)
海床ロボットコンソーシアムは竹中工務店、東京海洋大学海洋工学部清水研究室、IHI、炎重工、水辺総研、新木場海床プロジェクト、ウォーター・スマート・レジリエンス研究協会、あいおいニッセイ同和損害保険、ココホレジャパンから成る共同プロジェクトである。
2021年度から継続している実証実験は、2025年大阪・関西万博の会場予定地である夢洲における実証実験提案公募に採択されており、都市の水辺空間の有効活用と新たな交通手段の提供を目的としている。
水中・水面の環境データを航行制御に活用する安全な自動運航システムの実現可能性を検証する内容となった。
超小型水上ドローンとマルチビームソナーで水域情報を可視化
「海床ロボット」は純国産制御システムを搭載し、3メートル四方の床が海や運河・河川、湖沼などの水面を自動航行して離着岸を行う自動運転船である。
今回の実証実験では航行制御に必要な水域情報の可視化をテーマとして3つの実験を実施した。
実験1では超小型水上ドローン「海床ロボットMINI」と「MICRO」を使用し、水中および水面の障害物の有無や水質を撮影してリアルタイムで取得した情報の航行制御への活用可能性を検証した。
実験2では東陽テクニカの協力のもと、海床ロボットにマルチビームソナーを取り付けて水底をスキャンし、水深マップを作成することで水深情報を踏まえた航路設定の有効性を確認している。
(マルチビームソナーの装置(赤枠)とスキャンして作成した水深マップ)実験3ではハイパーデジタルツインの協力により陸側にLiDARセンサを設置し、海床ロボットの正確な位置情報を補足して航行制御に活用するための検証を行った。
(左:陸側に設置したLiDARセンサ/中央:カメラデータ(参考)/右:LiDARデータ)海床ロボットコンソーシアムは竹中工務店、東京海洋大学海洋工学部清水研究室、IHI、炎重工、水辺総研、新木場海床プロジェクト、ウォーター・スマート・レジリエンス研究協会、あいおいニッセイ同和損害保険、ココホレジャパンから成る共同プロジェクトである。
2021年度から継続している実証実験は、2025年大阪・関西万博の会場予定地である夢洲における実証実験提案公募に採択されており、都市の水辺空間の有効活用と新たな交通手段の提供を目的としている。
WRITTEN by

建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします












































