清水建設は、土木研究所、日立建機と共同で、土木研究所が整備を進める建設機械の自動施工技術基盤「OPERA」を活用した油圧ショベルの自動施工実験を実施し、土砂の掘削からダンプカーへの積載に至る一連の作業をシームレスに自動化することに成功したと発表した。
同社は今後、複数の建設機械を制御する自動施工システムのプラットフォームとしてOPERAを活用し、土工事の無人化施工の社会実装を進めていく方針である。
少子高齢化に伴う生産年齢人口の減少により建設業の生産能力の低下が危惧される中、土工事においては、建設機械が周辺環境を把握し、与えられた指示に従い自ら判断して作業を遂行する自動施工の社会実装が求められている状況である。
こうした背景のもと、土木研究所では、自動施工の研究開発用プラットフォームとしてOPERAの整備を進めている。OPERAは、ロボットシステムの構築に利用されているROS(Robot Operating System)に対応した建設機械の自動制御プラットフォームである。
OPERAの最大の特徴は、各種の自動運転対応型建設機械を共通の信号で制御できる通信インターフェースを備えていることである。この統合制御機能により、異なるメーカーの建設機械を同一システム内で連携動作させることが可能となる。
建設機械の自動施工に関する研究開発はこれまで、建設会社と建設機械メーカーが個別に秘密保持契約を結び、当該メーカーの建設機械に特化した制御プログラムを開発するのが一般的であった。
このため、建設会社と建機メーカーの組み合わせが変わるたびにカスタマイズが必要となるなど研究開発の効率性に課題があった。
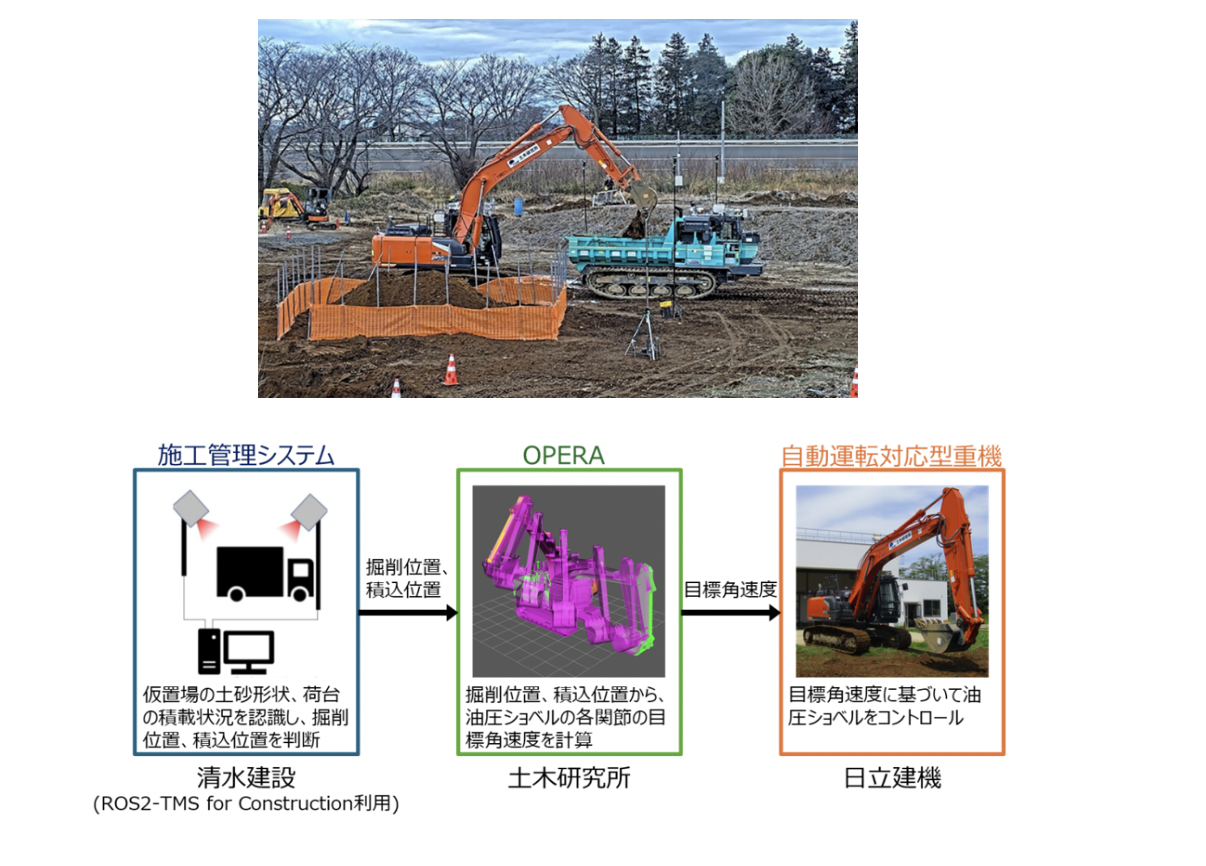
3者が実施した自動施工実験では、シールドトンネル工事で掘削された土砂の場外搬出作業をユースケースとして設定。
実験エリアに仮置きした土砂を油圧ショベルで掘削し、指定位置に停車したダンプカーに積載するまでの一連の作業の自動化に取り組んだ。
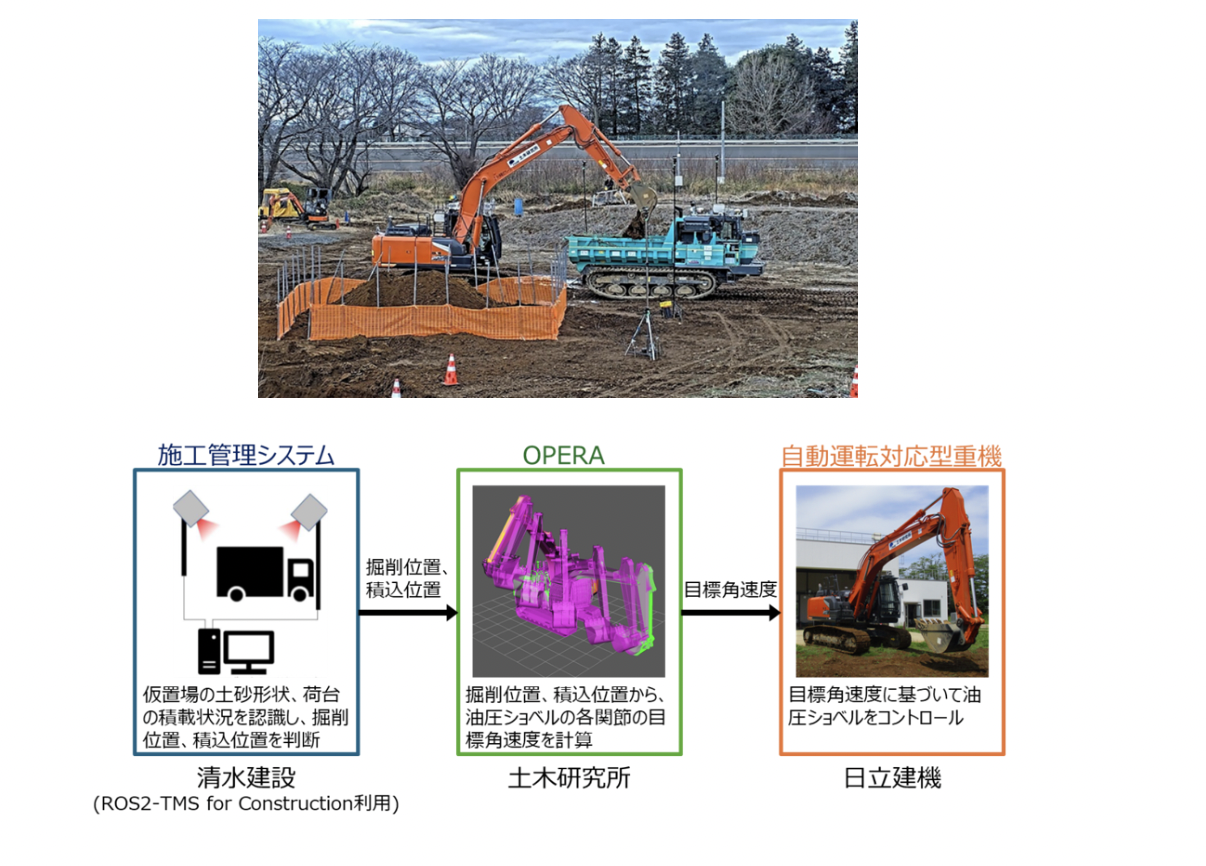
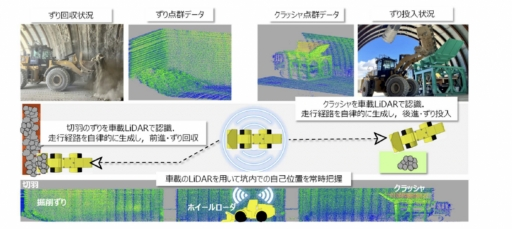
具体的には、油圧ショベルの周辺に設置した複数の3D-LiDARを用いて土砂の仮置場やダンプの停止場所付近の3D形状を常時取得するシステムを構築。この3D-LiDARによる空間認識技術により、リアルタイムでの地形変化と作業対象の正確な把握が実現されている。
認識した地形情報を基に土砂の掘削やダンプへの積載に関する指令を油圧ショベルに出力する自動施工システムを構築した。このシステムにより、人的介入なしに効率的な作業計画の立案と実行が可能となっている。
掘削時には、油圧ショベルが仮置場の土砂形状に基づき効率的に土砂をバケットに取り込む動作を自動実行する。土砂の形状や硬さに応じた最適な掘削パターンの選択により、作業効率の最大化が図られている。
ダンプへの積載時には、荷台の積載状況を踏まえて、空いているスペースに土砂を積載するよう油圧ショベルの動作を制御する機能を搭載している。この機能により、荷台スペースの有効活用と積載バランスの最適化が実現されている。
これらの作業を繰り返し、荷台が満杯になった段階で土砂の積載を停止する自動判断機能も組み込まれている。過積載の防止と運搬効率の向上を両立する制御システムとなっている。
同社は今後、複数の建設機械を制御する自動施工システムのプラットフォームとしてOPERAを活用し、土工事の無人化施工の社会実装を進めていく方針である。
ROS対応建設機械統合制御で異メーカー連携を実現。3D-LiDARによる地形認識でバケット効率取込・荷台積載状況判断、シールドトンネル土砂搬出作業の完全自動化システム構築
少子高齢化に伴う生産年齢人口の減少により建設業の生産能力の低下が危惧される中、土工事においては、建設機械が周辺環境を把握し、与えられた指示に従い自ら判断して作業を遂行する自動施工の社会実装が求められている状況である。
こうした背景のもと、土木研究所では、自動施工の研究開発用プラットフォームとしてOPERAの整備を進めている。OPERAは、ロボットシステムの構築に利用されているROS(Robot Operating System)に対応した建設機械の自動制御プラットフォームである。
OPERAの最大の特徴は、各種の自動運転対応型建設機械を共通の信号で制御できる通信インターフェースを備えていることである。この統合制御機能により、異なるメーカーの建設機械を同一システム内で連携動作させることが可能となる。
建設機械の自動施工に関する研究開発はこれまで、建設会社と建設機械メーカーが個別に秘密保持契約を結び、当該メーカーの建設機械に特化した制御プログラムを開発するのが一般的であった。
このため、建設会社と建機メーカーの組み合わせが変わるたびにカスタマイズが必要となるなど研究開発の効率性に課題があった。
3者が実施した自動施工実験では、シールドトンネル工事で掘削された土砂の場外搬出作業をユースケースとして設定。
実験エリアに仮置きした土砂を油圧ショベルで掘削し、指定位置に停車したダンプカーに積載するまでの一連の作業の自動化に取り組んだ。
具体的には、油圧ショベルの周辺に設置した複数の3D-LiDARを用いて土砂の仮置場やダンプの停止場所付近の3D形状を常時取得するシステムを構築。この3D-LiDARによる空間認識技術により、リアルタイムでの地形変化と作業対象の正確な把握が実現されている。
認識した地形情報を基に土砂の掘削やダンプへの積載に関する指令を油圧ショベルに出力する自動施工システムを構築した。このシステムにより、人的介入なしに効率的な作業計画の立案と実行が可能となっている。
掘削時には、油圧ショベルが仮置場の土砂形状に基づき効率的に土砂をバケットに取り込む動作を自動実行する。土砂の形状や硬さに応じた最適な掘削パターンの選択により、作業効率の最大化が図られている。
ダンプへの積載時には、荷台の積載状況を踏まえて、空いているスペースに土砂を積載するよう油圧ショベルの動作を制御する機能を搭載している。この機能により、荷台スペースの有効活用と積載バランスの最適化が実現されている。
これらの作業を繰り返し、荷台が満杯になった段階で土砂の積載を停止する自動判断機能も組み込まれている。過積載の防止と運搬効率の向上を両立する制御システムとなっている。
WRITTEN by

建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします