鹿島建設とSUBARUの2社が2025年日本国際博覧会(大阪・関西万博)会場へのアクセス道路として使用されている高速道路において、光ファイバセンシング技術を用いた路車協調型自動運転の実証実験を開始した。
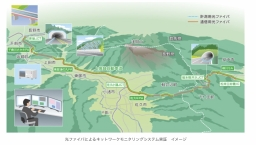
大阪市の協力のもと、アスファルト舗装の内部に光ファイバセンサケーブルを敷設し、道路モニタリングによる車両位置情報の共有を通じて自動運転を支援する。
鹿島とSUBARUは未来のモビリティ社会における安全な道路インフラの実現および交通事故の低減を目指し、2024年9月よりスバル研究実験センター美深試験場(北海道中川郡美深町)の高速道路を模した周回コースにおいて共同研究を進めている。
鹿島の光ファイバセンシングおよびSUBARU技術研究所の協調型自動運転の技術を用いた路車協調型自動運転の研究において、道路側からの低遅延かつ正確なデータ通信を要する路車協調型自動運転の試験を厳冬期環境下にて実施した。
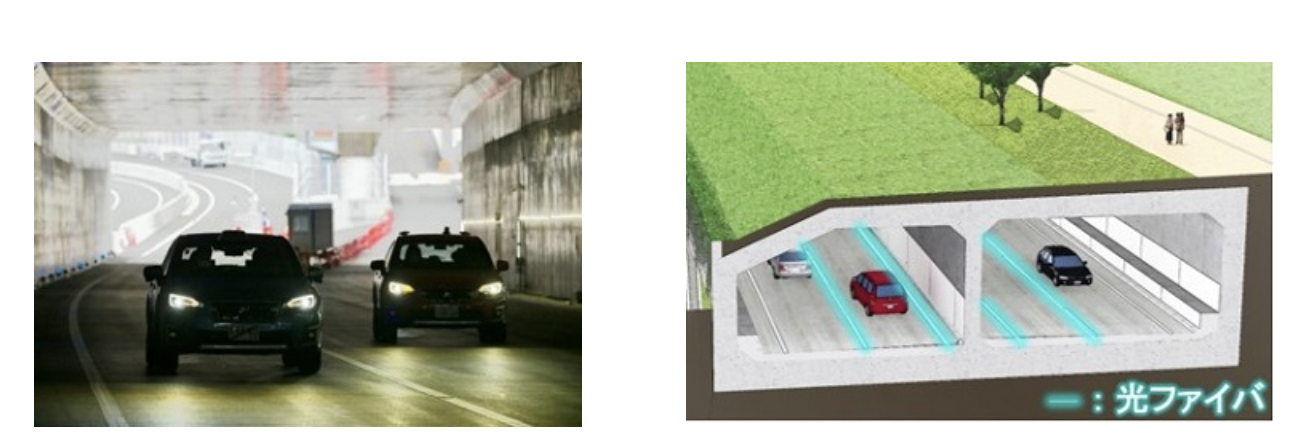
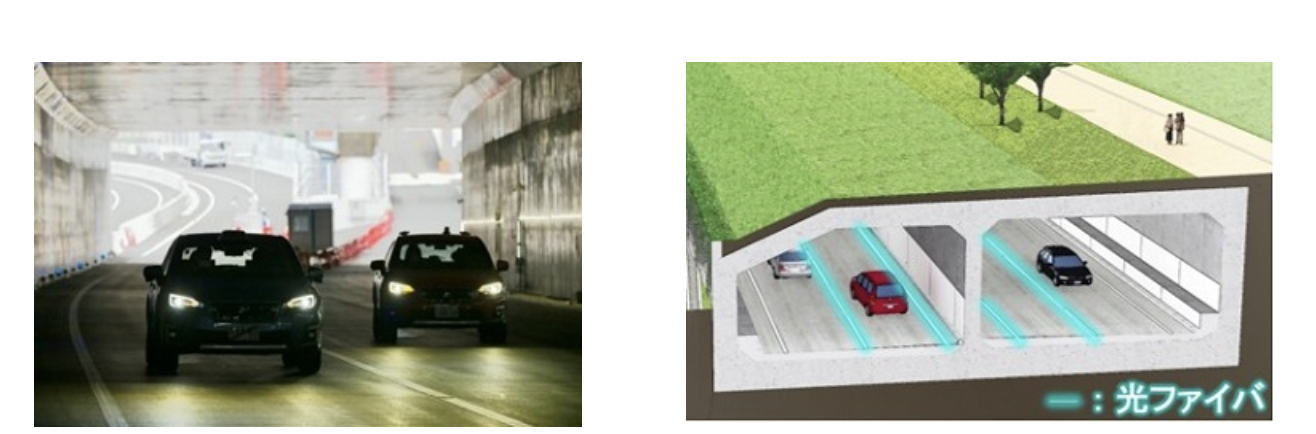 〈左:光ファイバセンシング技術を用いた路車協調型自動運転の実証実験を行う様子/右:光ファイバセンサケーブルの敷設位置(イメージ図)〉
〈左:光ファイバセンシング技術を用いた路車協調型自動運転の実証実験を行う様子/右:光ファイバセンサケーブルの敷設位置(イメージ図)〉
これらの研究成果をもとに、阪神高速道路の「コミュニケーション型共同研究制度」を活用し、2024年12月より「光ファイバセンシング技術を用いた道路インフラの自動運転支援技術」に関する実証実験を開始している。
 (スバル研究実験センターの厳冬期環境下おいて光ファイバセンシング技術を用いた路車協調型自動運転の実証実験を行う様子)
(スバル研究実験センターの厳冬期環境下おいて光ファイバセンシング技術を用いた路車協調型自動運転の実証実験を行う様子)
今回2社は万博会場へのアクセス道路として使用されている阪神高速道路淀川左岸線(2期)海老江区間に光ファイバセンサケーブルを敷設した。
 (アスファルト舗装内部へ光ファイバを敷設する様子)
(アスファルト舗装内部へ光ファイバを敷設する様子)
当該区間においてシャトルバスや実験車両を走行させ、道路に作用する走行荷重による振動やひずみを検知・計測し、道路および交通管理に資する道路モニタリングを行う。
道路モニタリングによってリアルタイムに得られる車両位置情報を自動運転車両と情報共有することで、車両位置の検出が困難なトンネル内での合流をユースケースとして、路車協調型自動運転の実証実験を行う。
テストコースならびに高速道路における光ファイバセンシング技術を用いた路車協調型自動運転の実証実験は、いずれも日本初の事例となっている。
路車協調型自動運転は自動運転車両と道路インフラ、周辺を走行する車両およびサーバーなどとの間で情報を通信することにより自動運転車両の走行を支援する自動運転システムである。
大阪市の協力のもと、アスファルト舗装の内部に光ファイバセンサケーブルを敷設し、道路モニタリングによる車両位置情報の共有を通じて自動運転を支援する。
阪神高速淀川左岸線海老江区間で実証、トンネル内合流をユースケースに車両位置をリアルタイム検出
鹿島とSUBARUは未来のモビリティ社会における安全な道路インフラの実現および交通事故の低減を目指し、2024年9月よりスバル研究実験センター美深試験場(北海道中川郡美深町)の高速道路を模した周回コースにおいて共同研究を進めている。
鹿島の光ファイバセンシングおよびSUBARU技術研究所の協調型自動運転の技術を用いた路車協調型自動運転の研究において、道路側からの低遅延かつ正確なデータ通信を要する路車協調型自動運転の試験を厳冬期環境下にて実施した。
〈左:光ファイバセンシング技術を用いた路車協調型自動運転の実証実験を行う様子/右:光ファイバセンサケーブルの敷設位置(イメージ図)〉これらの研究成果をもとに、阪神高速道路の「コミュニケーション型共同研究制度」を活用し、2024年12月より「光ファイバセンシング技術を用いた道路インフラの自動運転支援技術」に関する実証実験を開始している。
(スバル研究実験センターの厳冬期環境下おいて光ファイバセンシング技術を用いた路車協調型自動運転の実証実験を行う様子)今回2社は万博会場へのアクセス道路として使用されている阪神高速道路淀川左岸線(2期)海老江区間に光ファイバセンサケーブルを敷設した。
(アスファルト舗装内部へ光ファイバを敷設する様子)当該区間においてシャトルバスや実験車両を走行させ、道路に作用する走行荷重による振動やひずみを検知・計測し、道路および交通管理に資する道路モニタリングを行う。
道路モニタリングによってリアルタイムに得られる車両位置情報を自動運転車両と情報共有することで、車両位置の検出が困難なトンネル内での合流をユースケースとして、路車協調型自動運転の実証実験を行う。
テストコースならびに高速道路における光ファイバセンシング技術を用いた路車協調型自動運転の実証実験は、いずれも日本初の事例となっている。
路車協調型自動運転は自動運転車両と道路インフラ、周辺を走行する車両およびサーバーなどとの間で情報を通信することにより自動運転車両の走行を支援する自動運転システムである。
WRITTEN by


建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします