

鹿島が建設機械の自動運転を核とした自動化施工システム「A4CSEL」において、バックホウとアーティキュレートダンプトラックの2機種を新たに自動化した。
これらと既存の自動ブルドーザ、自動振動ローラと連携させることで、盛土作業を構成する積込み、運搬、敷均し、転圧にいたる一連の作業の自動化を4機種の連携作業により実現している。
A4CSELは最大の生産性を得る施工マネジメントシステムと、最大の作業効率を得る自律自動運転システムで構成されている。
これまでダム工事を中心に適用してきたが、造成工事への本格適用の皮切りとして自動振動ローラ2台を岡崎市阿知和地区工業団地造成事業に導入し、自動化施工を開始している。
造成工事の盛土作業は積込み、運搬、敷均し、転圧の4つの作業で構成されており、今後さらなる生産性向上を図るためには自動化施工が可能な作業を増やすことが重要となっている。
A4CSELがこれまでに培ってきた自動ダンプトラックによる運搬、自動ブルドーザによる敷均し、自動振動ローラによる転圧からなる一連の自動化施工技術は造成工事においても活用できる。
そこに自動バックホウによる積込みと、造成工事の仮設道路を走行できる自動アーティキュレートダンプトラックによる運搬を加えることで、盛土作業を構成する一連の作業を自動化することが可能となった。
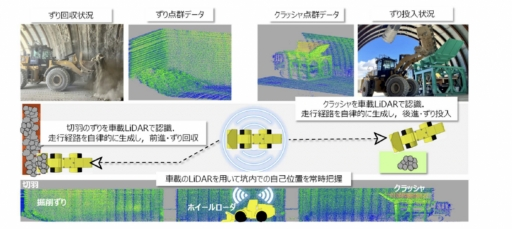
自動バックホウは積込み作業の自動化を担当し、機体に搭載したセンサーで周辺環境を認識する。
材料山の形状をリアルタイムに認識して最適な掘削を実施し、自動アーティキュレートダンプトラックの停止位置を認識して最適な量の積込みを実施する機能を持っている。
自動アーティキュレートダンプトラックは仮設道路での運搬の自動化を行う。
アーティキュレートダンプトラックの最大の特徴である中折れ式の機構を活かした自動制御により、悪路の走行、小範囲での旋回が可能となっている。
これまで培ってきた最適な経路生成技術と新たに開発した中折れ式の機構特有の後進操作の最適化により、施工箇所まで最短距離で効率的かつ正確に材料を自動運搬できる。
鹿島西湘実験フィールド(神奈川県小田原市)において、自動バックホウによる積込み、自動アーティキュレートダンプトラックによる運搬と荷下ろし、自動ブルドーザによる敷均し、自動振動ローラによる転圧にいたる一連の作業を自動化機械4機種の連携により実施した。
これにより盛土作業を構成する一連の作業を自動化することを実証している。
新機種と連携した自動のブルドーザと振動ローラは、現場での実証を経て既存システムを高度化させている。
自動ブルドーザは、AIによる材料形状の認識や最適な経路生成により、階段状やスロープ状の整形にも対応するなど繊細な作業が可能となっている。
自動振動ローラは、専用の作業計画システムにより複雑な形状や狭小エリアでの作業が可能となった。
これらと既存の自動ブルドーザ、自動振動ローラと連携させることで、盛土作業を構成する積込み、運搬、敷均し、転圧にいたる一連の作業の自動化を4機種の連携作業により実現している。
鹿島西湘実験フィールドで積込みから転圧まで一連の自動化作業を実証
A4CSELは最大の生産性を得る施工マネジメントシステムと、最大の作業効率を得る自律自動運転システムで構成されている。
これまでダム工事を中心に適用してきたが、造成工事への本格適用の皮切りとして自動振動ローラ2台を岡崎市阿知和地区工業団地造成事業に導入し、自動化施工を開始している。
造成工事の盛土作業は積込み、運搬、敷均し、転圧の4つの作業で構成されており、今後さらなる生産性向上を図るためには自動化施工が可能な作業を増やすことが重要となっている。
A4CSELがこれまでに培ってきた自動ダンプトラックによる運搬、自動ブルドーザによる敷均し、自動振動ローラによる転圧からなる一連の自動化施工技術は造成工事においても活用できる。
そこに自動バックホウによる積込みと、造成工事の仮設道路を走行できる自動アーティキュレートダンプトラックによる運搬を加えることで、盛土作業を構成する一連の作業を自動化することが可能となった。
自動バックホウは積込み作業の自動化を担当し、機体に搭載したセンサーで周辺環境を認識する。
材料山の形状をリアルタイムに認識して最適な掘削を実施し、自動アーティキュレートダンプトラックの停止位置を認識して最適な量の積込みを実施する機能を持っている。
自動アーティキュレートダンプトラックは仮設道路での運搬の自動化を行う。
アーティキュレートダンプトラックの最大の特徴である中折れ式の機構を活かした自動制御により、悪路の走行、小範囲での旋回が可能となっている。
これまで培ってきた最適な経路生成技術と新たに開発した中折れ式の機構特有の後進操作の最適化により、施工箇所まで最短距離で効率的かつ正確に材料を自動運搬できる。
鹿島西湘実験フィールド(神奈川県小田原市)において、自動バックホウによる積込み、自動アーティキュレートダンプトラックによる運搬と荷下ろし、自動ブルドーザによる敷均し、自動振動ローラによる転圧にいたる一連の作業を自動化機械4機種の連携により実施した。
これにより盛土作業を構成する一連の作業を自動化することを実証している。
新機種と連携した自動のブルドーザと振動ローラは、現場での実証を経て既存システムを高度化させている。
自動ブルドーザは、AIによる材料形状の認識や最適な経路生成により、階段状やスロープ状の整形にも対応するなど繊細な作業が可能となっている。
自動振動ローラは、専用の作業計画システムにより複雑な形状や狭小エリアでの作業が可能となった。
WRITTEN by

建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします












































