Terra Droneは、NEDOの「次世代空モビリティ実現プロジェクト」の一環として実施された実証実験に協力企業として参加し、自社開発の「Terra UTM」を活用した。
同一空域内で複数の異なるドローン運航管理システム(UTMS:UAS Traffic Management System)間の連携による安全運航の実現性が確認された。
実証実験は2025年2月19日と20日に福島ロボットテストフィールド(福島県南相馬市)で行われ、KDDI、NTTデータを実証主体とし、トラジェクトリーとTerra Droneが協力企業として参加した。
参加各社は、実災害を想定したシナリオのもと、それぞれのUTMSを活用して最大5機のドローンを同一空域で運航する実証を実施している。
飛行計画の調整、フライトステータスのモニタリング、空域・気象情報の共有、緊急用務空域の設定など、多様な運用ケースに対応したシステム連携が行われた。
各社のUTMS間の連携においては、国土交通省航空局が運用するドローン情報基盤システム「DIPS2.0」に相当する機能を模擬的に構築して実証が進められた。
さらに、UTMS非利用のドローン運航者を含む運用シナリオも組み込まれ、デジタルツールを活用した運航情報の共有と相互調整の有効性も確認された点が注目される。
この実証実験の背景には、ドローン活用が農業、測量、インフラ点検にとどまらず、災害対応や物流といった公共性の高い分野にも拡大していることがある。
複数のドローンや有人機が同一空域内を安全かつ効率的に飛行するためには、飛行計画、運航状況、気象・空域情報などを共有・調整できる仕組みが不可欠となっている。

これに対応するため、国土交通省航空局は、無人航空機間での衝突を防止し、安全・効率的な運航管理をより広く実現することを目的に、適正な機能を持つUTMサービスプロバイダの認定を開始する予定である。
今回の実証は、この制度の開始に先立ち、UTMSの機能性と運用性を検証する目的で実施された。
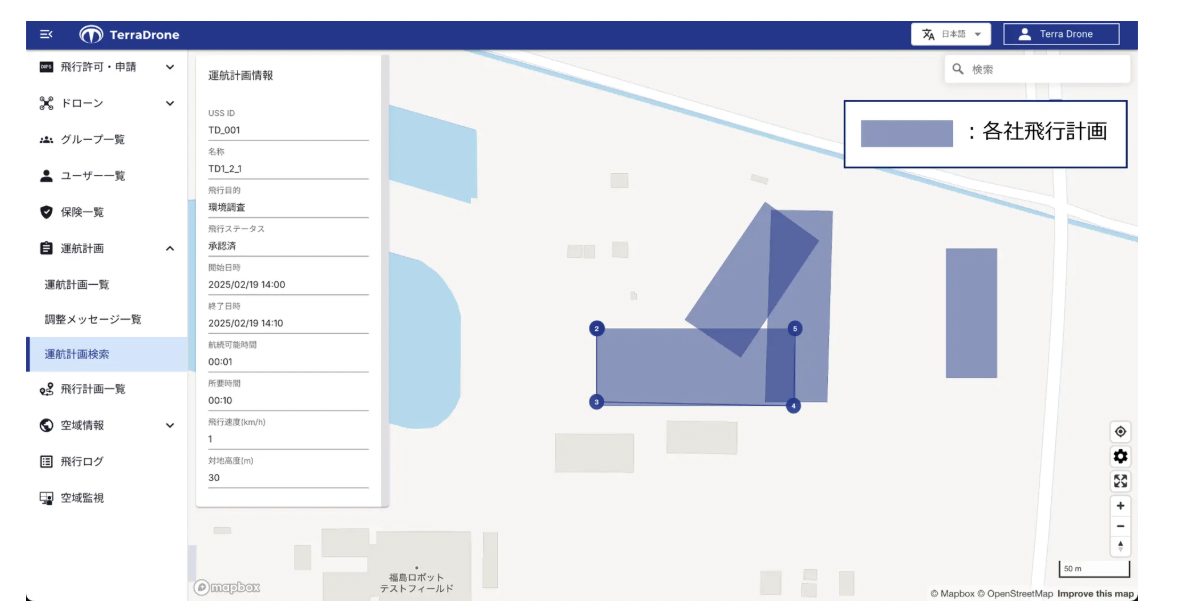
Terra Droneは、本実証において自社開発の「Terra UTM」を活用し、飛行計画の作成・登録、飛行エリアの重複検知および他社UTMSとの調整による重複解消、フライトステータスの共有と可視化、DIPS2.0模擬環境経由でのUTMS間連携などの機能を担った。
特に、緊急空域が設定される状況下での調整や、複数の運航者がリアルタイムに情報を共有・対応する場面においても、「Terra UTM」の安定稼働と連携性が確認された点が成果として挙げられる。
この実証実験の成功により、今後増加が見込まれる複数ドローンの同時運用において、異なるシステム間での安全な連携が可能であることが示された。
同一空域内で複数の異なるドローン運航管理システム(UTMS:UAS Traffic Management System)間の連携による安全運航の実現性が確認された。
福島ロボットテストフィールドで最大5機同時飛行、DIPS2.0模擬環境で緊急時対応も検証
実証実験は2025年2月19日と20日に福島ロボットテストフィールド(福島県南相馬市)で行われ、KDDI、NTTデータを実証主体とし、トラジェクトリーとTerra Droneが協力企業として参加した。
参加各社は、実災害を想定したシナリオのもと、それぞれのUTMSを活用して最大5機のドローンを同一空域で運航する実証を実施している。
飛行計画の調整、フライトステータスのモニタリング、空域・気象情報の共有、緊急用務空域の設定など、多様な運用ケースに対応したシステム連携が行われた。
各社のUTMS間の連携においては、国土交通省航空局が運用するドローン情報基盤システム「DIPS2.0」に相当する機能を模擬的に構築して実証が進められた。
さらに、UTMS非利用のドローン運航者を含む運用シナリオも組み込まれ、デジタルツールを活用した運航情報の共有と相互調整の有効性も確認された点が注目される。
この実証実験の背景には、ドローン活用が農業、測量、インフラ点検にとどまらず、災害対応や物流といった公共性の高い分野にも拡大していることがある。
複数のドローンや有人機が同一空域内を安全かつ効率的に飛行するためには、飛行計画、運航状況、気象・空域情報などを共有・調整できる仕組みが不可欠となっている。
これに対応するため、国土交通省航空局は、無人航空機間での衝突を防止し、安全・効率的な運航管理をより広く実現することを目的に、適正な機能を持つUTMサービスプロバイダの認定を開始する予定である。
今回の実証は、この制度の開始に先立ち、UTMSの機能性と運用性を検証する目的で実施された。
Terra Droneは、本実証において自社開発の「Terra UTM」を活用し、飛行計画の作成・登録、飛行エリアの重複検知および他社UTMSとの調整による重複解消、フライトステータスの共有と可視化、DIPS2.0模擬環境経由でのUTMS間連携などの機能を担った。
特に、緊急空域が設定される状況下での調整や、複数の運航者がリアルタイムに情報を共有・対応する場面においても、「Terra UTM」の安定稼働と連携性が確認された点が成果として挙げられる。
この実証実験の成功により、今後増加が見込まれる複数ドローンの同時運用において、異なるシステム間での安全な連携が可能であることが示された。
WRITTEN by



建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします