ドローンを代表とする無人航空機は、農薬散布、空撮、測量、インフラ点検など様々な分野で活用が広がっている。
これまでは1人の操縦者が1機のドローンを飛ばすのが一般的だったが、より効率的な運用のためには「1人の操縦者が複数の機体を同時に操作する」という新しい形が求められてきた。
この流れを受けて、国土交通省は2025年3月、「無人航空機の多数機同時運航を安全に行うためのガイドライン第一版」を発表した。
本記事では、このガイドラインの内容をわかりやすく解説する。
無人航空機は、人が行きにくい場所の調査や、人手不足を補う作業の自動化など、社会課題の解決に貢献するツールとして期待されている。
2015年以降の航空法改正により、飛行許可・承認制度や機体の登録制度などが整備され、安全な運航のための基盤が整ってきた。
2023年3月には、「レベル4飛行(有人地帯での補助者なし目視外飛行)」が実現し、同年12月には「レベル3飛行(無人地帯での補助者なし目視外飛行)」における立入管理措置の負担を軽減する「レベル3.5飛行」の制度も登場した。
無人航空機の活用をさらに発展させるためには、少人数で多数の機体を効率的に運航できる仕組みが必要である。
これらの形態を実現する「多数機同時運航」の普及拡大が求められていた。
しかし、多数機同時運航に特化した安全要件は明確に定められておらず、各事業者が独自に安全対策を講じて実証実験を行っている状況だった。
このガイドラインは、無人航空機の安全確保を最大限図りながら、事業化や社会実装を推進することを目的としている。
航空法に基づく規制の中で、安全に多数機同時運航を行うための要件を示している。
このガイドライン第一版では、以下の範囲を対象としている。
多数機同時運航を実施するには、自動操縦機能の活用が不可欠とされている。
将来的には、より高度な運航形態や自動化に対応するため、対象範囲を拡大していく予定である。
機体の自動化の度合いに応じて機体数の段階的な増加についても検討されている。
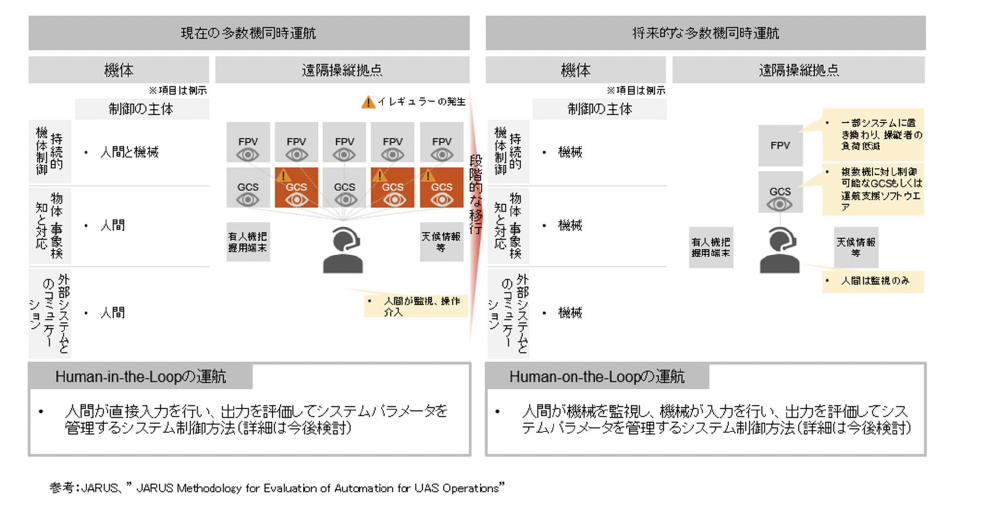
多数機同時運航には、大きく分けて2つの制御方式がある。
レベル3飛行で多数機同時運航を行う場合、従来通りの審査を実施し、飛行の許可・承認が得られた場合、同様の運航であれば過去の申請書番号を引用することで許可・承認の1日化(迅速化)を目指す。
申請にあたっては以下の対応が必要である。
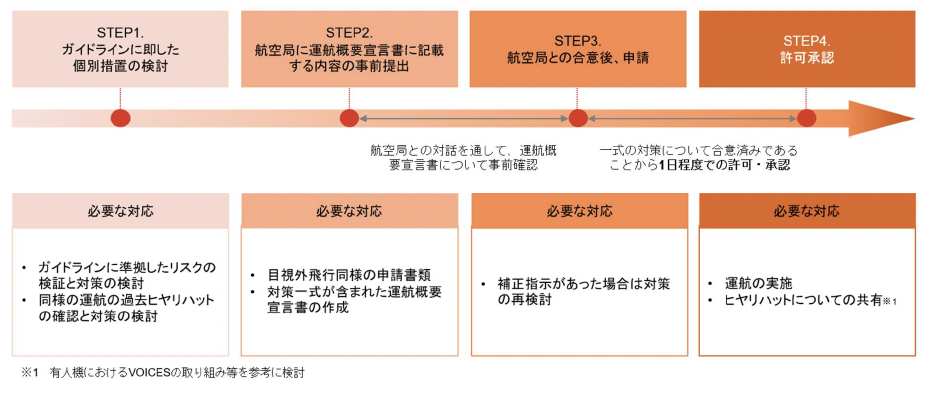
レベル3.5飛行の場合は、目視外飛行の延長ケースとして審査要領をベースとした申請に加え、ガイドラインに記載の個別の措置について、運航概要宣言書に記載する対応が必要である。
この場合、事前に航空局との協議が必要だが、不備がなければ1日程度で許可・承認される。
多数機同時運航を行うにあたり、機体は審査要領の以下の項目に適合する必要がある。
操縦者には以下の知識・能力が求められる。
ガイドラインでは、多数機同時運航において特に注意すべき3つの代表的な不安全事象と、それらに対する予防策・回復策が示されている。
ガイドラインでは、リスク分析手法として「ボウタイ(蝶ネクタイ)分析」を推奨している。
これは、不安全事象を中心に置き、左側にその原因となる脅威と予防策、右側に事故等の結果と回復策を整理する方法である。
ボウタイ分析の具体的な手順は以下の通りである。
多数機同時運航を行うにあたり、以下のようなマニュアル類の作成が推奨されている。
無人航空機の多数機同時運航ガイドライン第一版は、ドローンのさらなる活用拡大に向けた重要な一歩だ。
このガイドラインでは、レベル3・3.5飛行において、1人の操縦者が最大5機までの無人航空機を安全に運航するための要件が定められている。
多数機同時運航を行うには、機体の要件、操縦者の知識・能力・訓練、そして適切な運航管理体制が不可欠。
また、想定されるリスクに対する予防策と回復策を事前に検討し、必要なマニュアル類を整備することが重要となる。
今後、技術の進歩とともにガイドラインも更新され、より多くの機体を同時に運航できる可能性も広がっていくだろう。
これまでは1人の操縦者が1機のドローンを飛ばすのが一般的だったが、より効率的な運用のためには「1人の操縦者が複数の機体を同時に操作する」という新しい形が求められてきた。
この流れを受けて、国土交通省は2025年3月、「無人航空機の多数機同時運航を安全に行うためのガイドライン第一版」を発表した。
本記事では、このガイドラインの内容をわかりやすく解説する。
ガイドライン策定の背景
ドローン活用の広がりと技術の進化
無人航空機は、人が行きにくい場所の調査や、人手不足を補う作業の自動化など、社会課題の解決に貢献するツールとして期待されている。
2015年以降の航空法改正により、飛行許可・承認制度や機体の登録制度などが整備され、安全な運航のための基盤が整ってきた。
2023年3月には、「レベル4飛行(有人地帯での補助者なし目視外飛行)」が実現し、同年12月には「レベル3飛行(無人地帯での補助者なし目視外飛行)」における立入管理措置の負担を軽減する「レベル3.5飛行」の制度も登場した。
多数機同時運航の必要性
無人航空機の活用をさらに発展させるためには、少人数で多数の機体を効率的に運航できる仕組みが必要である。
- 1人の操縦者が複数の無人航空機を運航する「1:N運航」
- 複数の操縦者が多数の無人航空機を運航する「M:N 運航」
これらの形態を実現する「多数機同時運航」の普及拡大が求められていた。
しかし、多数機同時運航に特化した安全要件は明確に定められておらず、各事業者が独自に安全対策を講じて実証実験を行っている状況だった。
ガイドラインの目的
このガイドラインは、無人航空機の安全確保を最大限図りながら、事業化や社会実装を推進することを目的としている。
航空法に基づく規制の中で、安全に多数機同時運航を行うための要件を示している。
ガイドラインの対象範囲
第一版の対象
このガイドライン第一版では、以下の範囲を対象としている。
- 航空法に基づくレベル3または3.5飛行により、各機体が独立した形態で操縦者1人に対して無人航空機5機まで(操縦者2人に対して無人航空機10機など)の運航を行うもの
- レベル1または2飛行(ドローンショーなど)における多数機同時運航
多数機同時運航を実施するには、自動操縦機能の活用が不可欠とされている。
将来の拡大予定
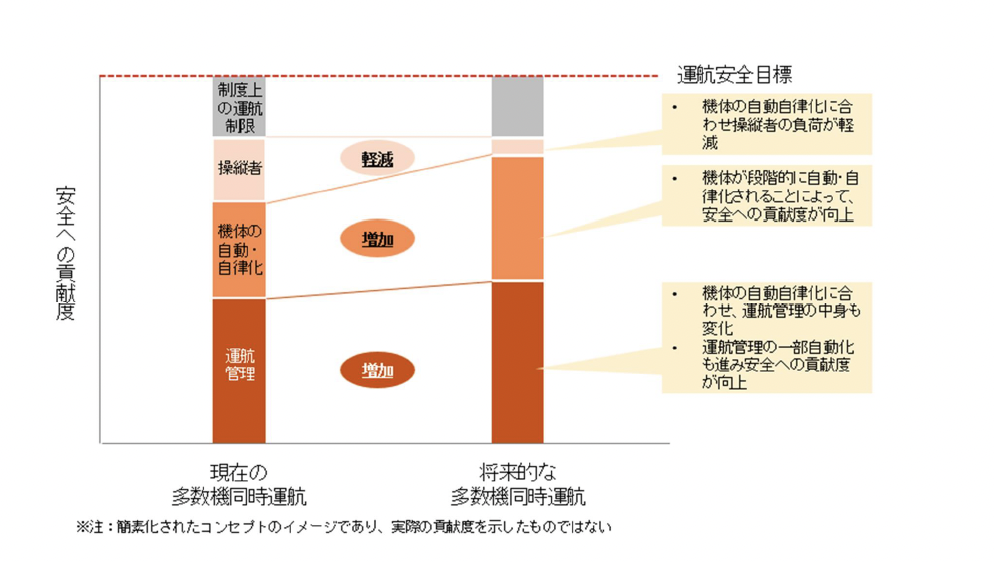
将来的には、より高度な運航形態や自動化に対応するため、対象範囲を拡大していく予定である。
機体の自動化の度合いに応じて機体数の段階的な増加についても検討されている。
多数機同時運航の形態と分類
多数機同時運航には、大きく分けて2つの制御方式がある。
《先導機のみを制御し、他機は追従する形態》
- 一機のドローンを操縦し、残りのドローンはそれに追従する方式
- 論理的な優先度の観点から、ガイドライン第一版の対象としている
《各機体に独立した制御を実施する形態》
- それぞれのドローンを個別に制御する方式
- パターンごとの具体例は別紙に参照されている
飛行許可・承認申請の流れ
レベル3飛行での申請手順
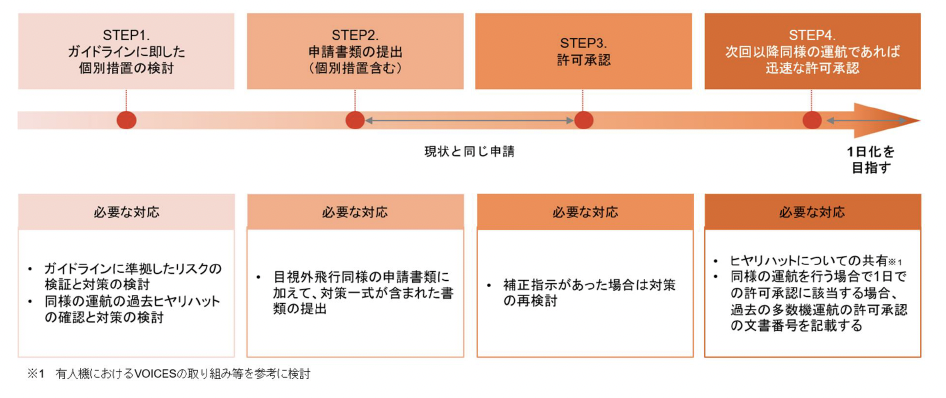
レベル3飛行で多数機同時運航を行う場合、従来通りの審査を実施し、飛行の許可・承認が得られた場合、同様の運航であれば過去の申請書番号を引用することで許可・承認の1日化(迅速化)を目指す。
申請にあたっては以下の対応が必要である。
- ガイドラインに照らしたリスクの検証と対策の検討
- 個別の運航形態の要件と飛行の実施
- 補正指示があった場合の対策
- ヒヤリハットに関する情報や、同様の運航を1日で許可承認を得る場合の対応
レベル3.5飛行での申請手順
レベル3.5飛行の場合は、目視外飛行の延長ケースとして審査要領をベースとした申請に加え、ガイドラインに記載の個別の措置について、運航概要宣言書に記載する対応が必要である。
この場合、事前に航空局との協議が必要だが、不備がなければ1日程度で許可・承認される。
多数機同時運航に関する要件
機体の要件
多数機同時運航を行うにあたり、機体は審査要領の以下の項目に適合する必要がある。
- 審査要領4-1-1(5):第三者上空での飛行に関する安全対策
- 審査要領5-4(1):無人航空機の自動操縦を行う場合の要件
操縦者の要件
操縦者には以下の知識・能力が求められる。
《知識の要件》
- 多数機同時運航固有のリスク(複数の不具合が同時発生するなど)
- 多数機同時運航に伴い増加するリスク(機体や周辺の状況把握が不十分になるなど)
《能力の要件》
- 異常発生時の対応と、他の機体の運航監視を両立できること
- 複数機で異常が発生しても同時に対応できること
《訓練の要件》
- 同時運航の機体数を段階的に増加させて判断と操作に十分慣熟すること
- 緊急時の判断と操作に十分慣熟すること
運航管理の要件
《組織の要件》
- 異常発生時の対応可能性を検証できること
- 組織体制、無人航空機の飛行に直接関与している者の役割分担を明確化すること
- ヒヤリハット等も含めた情報を運航者が内外に共有する体制を有すること
《運航システムの要件》
- 運航状況の把握や運航判断を容易にする操作画面や監視画面の配置とすること
運航リスクと対策例
ガイドラインでは、多数機同時運航において特に注意すべき3つの代表的な不安全事象と、それらに対する予防策・回復策が示されている。
不安全事象1:機体周辺の状況把握不足
《潜在的リスク》
- 情報が多く複雑
- 1機の遠隔自動運航と比較して疲労が蓄積しやすい
- コミュニケーションが複雑になる
《予防策》
- 機体一人当たりの担当機数の上限を設定
- 連続飛行時間の上限を設定
- 役割分担の明確化
- 明確な言葉での簡潔なコミュニケーション
《万一の対策》
- バッテリー残量低下時の緊急着陸地点設定
- パラシュート等による落下衝撃緩和
不安全事象2:機体の制御不能
《予防策》
- 操縦装置の同時運航可能機数の検証
- 電波環境調査と通信の冗長化
- 気象状況の把握
《万一の対策》
- 異常発生時の対応手順と役割の明確化
- 緊急着陸地点の設定
- 自動衝突回避システムの搭載
不安全事象3:機体間の接近・衝突
《潜在的リスク》
- 通信途絶
- 飛行ルート設定ミス
《予防策》
- 電波環境調査
- 緊急時の飛行ルート確認
- 飛行ルートの垂直・水平方向の間隔確保
- 機体の明確な識別方法
《万一の対策》
- 異常発生時の対応手順と役割の明確化
- 自動衝突回避システムの活用
リスク分析手法:ボウタイ分析
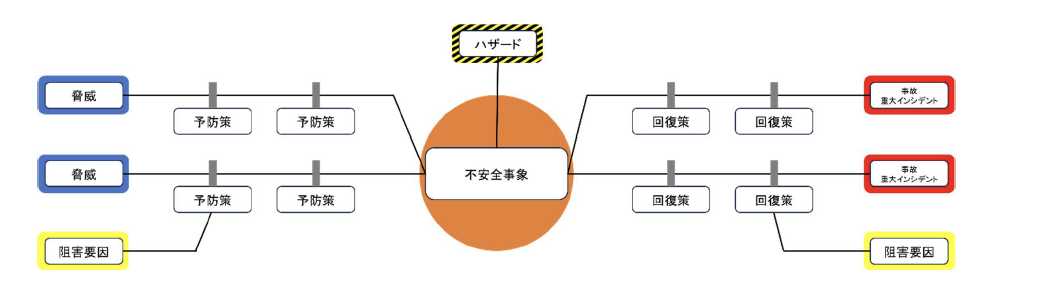
ガイドラインでは、リスク分析手法として「ボウタイ(蝶ネクタイ)分析」を推奨している。
これは、不安全事象を中心に置き、左側にその原因となる脅威と予防策、右側に事故等の結果と回復策を整理する方法である。
ボウタイ分析の具体的な手順は以下の通りである。
- ハザード(潜在的な危険)を特定し、中心に記載
- 不安全事象を引き起こす可能性のある要因(脅威)を左端に記載
- 不安全事象が発生した場合の結果を右端に記載
- 脅威から不安全事象への経路を遮断する予防策を左側に記載
- 不安全事象から結果への経路を遮断する回復策を右側に記載
追加で作成すべきマニュアル類
多数機同時運航を行うにあたり、以下のようなマニュアル類の作成が推奨されている。
運航マニュアル
- 直接関与者の選定要件
- 運航方針
- 運航における基準
- 事故・重大インシデント等への組織対応手順
通常時対応手順書
- 日常点検手順
- 事前準備手順
- 運航手順
緊急時対応手順書
- 想定される運航における異常事態及び緊急事態への対応手順
安全管理規程
- 安全方針と安全管理体制
- リスクマネジメント
- 安全推進
- 事故・重大インシデント等への組織対応方針
教育訓練・資格管理マニュアル
- 必要な教育の実施要領
- 訓練記録
その他
- ReAMo(次世代空モビリティの社会実装に向けた実現プロジェクト)プロジェクトによる取組
- レベル3.5飛行で操縦者:機体比率1:5
- 物流配送の実証(秩父、浦安、瀬戸内町での実験)
まとめ
無人航空機の多数機同時運航ガイドライン第一版は、ドローンのさらなる活用拡大に向けた重要な一歩だ。
このガイドラインでは、レベル3・3.5飛行において、1人の操縦者が最大5機までの無人航空機を安全に運航するための要件が定められている。
多数機同時運航を行うには、機体の要件、操縦者の知識・能力・訓練、そして適切な運航管理体制が不可欠。
また、想定されるリスクに対する予防策と回復策を事前に検討し、必要なマニュアル類を整備することが重要となる。
今後、技術の進歩とともにガイドラインも更新され、より多くの機体を同時に運航できる可能性も広がっていくだろう。
出典元:「無人航空機の多数機同時運航を安全に行うためのガイドライン第一版」令和7年3月、国土交通省
WRITTEN by


建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします