ニュース
LiDAR・自律走行・産学連携で「i-Construction 2.0」の施工オートメーション化へ。鹿島道路がホイールローダ自動化技術の開発に本格着手


鹿島道路は、国土交通省が推進する「i-Construction 2.0」の最重要施策である「施工のオートメーション化」への貢献を経営戦略の核として位置づけ、ホイールローダ自動化技術の開発に本格着手した。
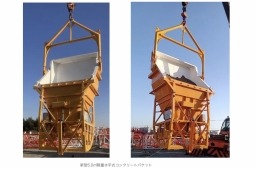
最新型の電動ホイールローダを新たに購入し、中間処理事業における掻き揚げ・積込作業の自動化をターゲットとした3か年計画での開発プロセスを加速させる。
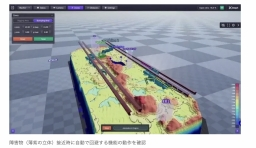
現在進行中のフェーズ1では、電動ホイールローダを開発拠点「技術開発総合センター」に導入し、車両位置確認・自動走行経路作成・LiDAR技術を活用した対象物検知など最先端の自動化技術の確立に注力している。
今後はアスファルトプラントへの応用展開や複数台の建設機械を連携させる群制御を含む多段階の技術開発を進め、総合的な自律システムの実現を目指す。
技術開発には成蹊大学竹岡研究室との産学連携による高精度な自動運転システムの開発と、株式会社シサクウェアとの現場適用に向けた制御システムの共同開発を推進しており、国土交通省が進める「自動施工導入シミュレータ」や「自動施工導入データベース」との連携も検討している。
鹿島道路は自動化を「競争領域」としての自社機械開発と、「協調領域」としての業界共通ルール・仕組み整備の両面から推進する方針だ。
国土交通省主導で異なるメーカーの建設機械を同じプログラムで動作可能とする自律施工技術基盤「OPERA」の整備とも連携し、安全な自律化に関する知見やデータを業界全体へのフィードバックとして活用していく。
最新型の電動ホイールローダを新たに購入し、中間処理事業における掻き揚げ・積込作業の自動化をターゲットとした3か年計画での開発プロセスを加速させる。
フェーズ1は電動機の導入・車両位置確認・自動走行経路作成・LiDARによる対象物検知。産学連携で自律制御を開発
現在進行中のフェーズ1では、電動ホイールローダを開発拠点「技術開発総合センター」に導入し、車両位置確認・自動走行経路作成・LiDAR技術を活用した対象物検知など最先端の自動化技術の確立に注力している。
今後はアスファルトプラントへの応用展開や複数台の建設機械を連携させる群制御を含む多段階の技術開発を進め、総合的な自律システムの実現を目指す。
技術開発には成蹊大学竹岡研究室との産学連携による高精度な自動運転システムの開発と、株式会社シサクウェアとの現場適用に向けた制御システムの共同開発を推進しており、国土交通省が進める「自動施工導入シミュレータ」や「自動施工導入データベース」との連携も検討している。
単なる自動化ではなく「安全で賢い」自動化を追求。業界共通の自律施工技術基盤OPERAとも連携
鹿島道路は自動化を「競争領域」としての自社機械開発と、「協調領域」としての業界共通ルール・仕組み整備の両面から推進する方針だ。
国土交通省主導で異なるメーカーの建設機械を同じプログラムで動作可能とする自律施工技術基盤「OPERA」の整備とも連携し、安全な自律化に関する知見やデータを業界全体へのフィードバックとして活用していく。
WRITTEN by

-
デジコン編集部
-
デジコン編集部
-
デジコン編集部
-
デジコン編集部
-
デジコン編集部
-
PR デジコン編集部
-
PR デジコン編集部


建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします