コベルコ建機と安藤ハザマは、山岳トンネル工事における「あたり取り作業」の自動化技術を開発し、施工中のトンネル現場で実証実験を実施した。
コベルコ建機が開発中の自動運転システムを搭載したブレーカーショベルと、安藤ハザマが2024年に開発した「あたり検知システム」を連携させることで、従来は重機オペレータと作業員の2名が切羽付近で目視確認しながら行っていた危険な作業の無人化を目指す。
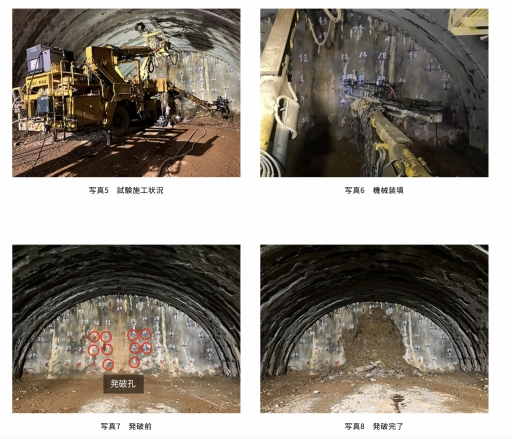
あたり取り作業とは、発破後の切羽岩盤に生じた設計断面から内空側に飛び出した岩塊(あたり)をブレーカーショベルで除去する作業で、従来は掘削直後の切羽付近で目視確認を行う必要があるため肌落ち災害のリスクが高い作業だった。
本技術では、あたり検知システムが取得したブレーカーショベルの自己位置・姿勢・あたり箇所などの情報を自動運転システムに入力し、あたり箇所を除去するためのブームとアームの最適な動作経路を自動で算出する。
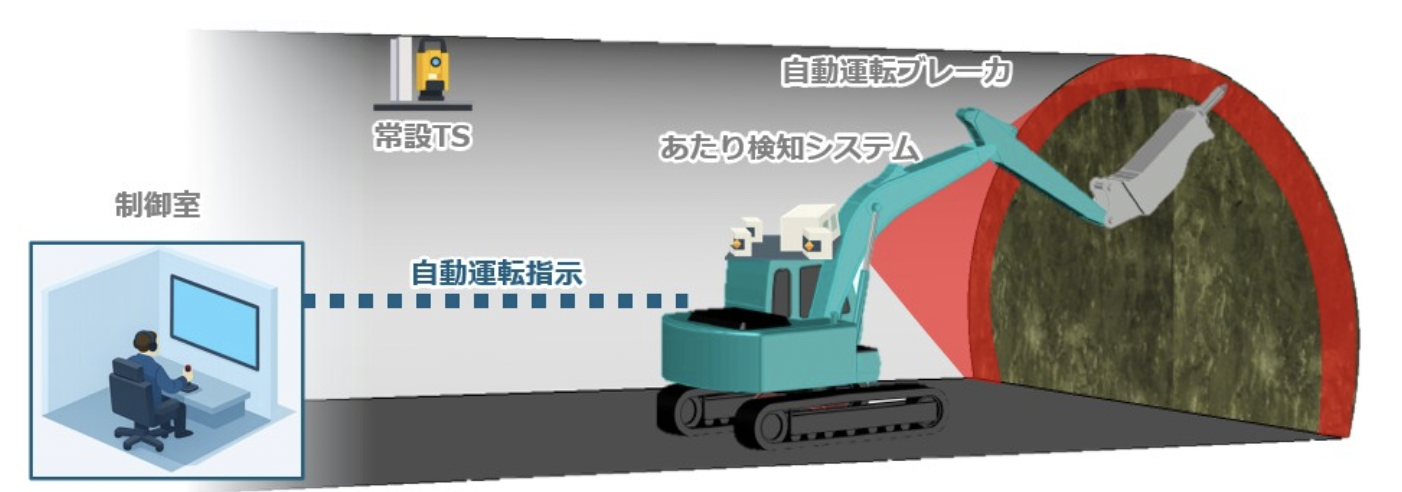
実証実験では切羽前に無人のブレーカーショベルを配置し、後方からタブレットで自動運転指示を行う形で一連の動作を確認した。
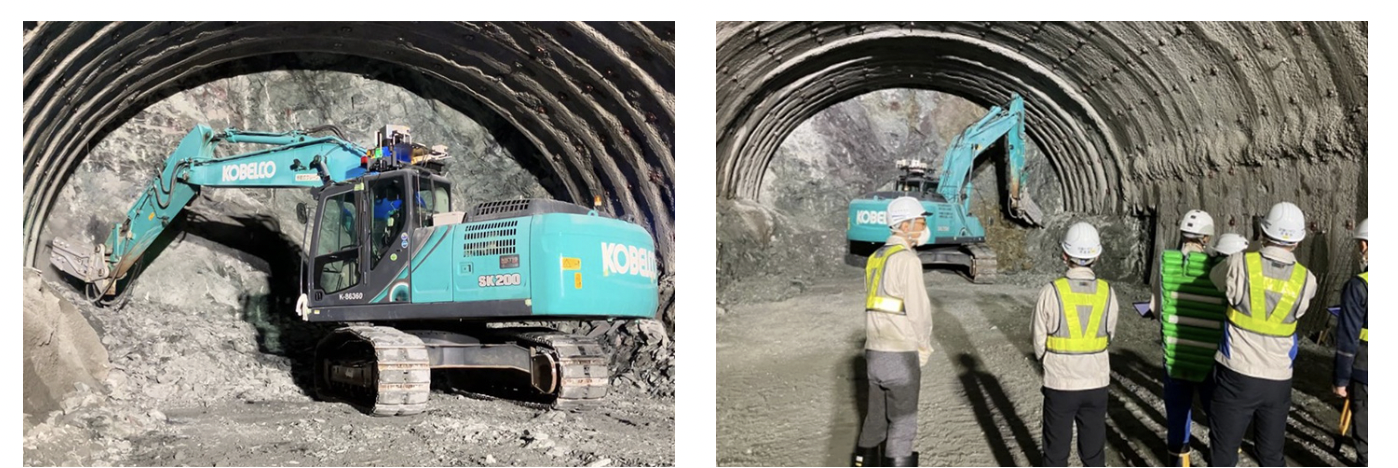
トンネル特有の限られた作業空間においても、自動で動作するブレーカーショベルがトンネル壁面に触れることなくチゼル先端をあたり箇所に適切に誘導できることを確認しており、岩盤を打撃する動作に関する課題の抽出など今後の改良に向けた具体的な検討項目も明確になった。
両社はこれまでにも油圧ショベルの自動運転システムを共同開発し、ダンプトラックへの土砂積込み技術を確立した実績を持つ。

今回はその成果を基盤にブレーカーショベルへ応用を拡大した形で、国土交通省が山岳トンネル工事の施工オートメーション化を推進する流れとも合致している。
今後は遠隔化も組み合わせた自動施工技術によるあたり取り作業の安全性向上を目指し、両社が引き続き技術検証を推進していく方針だ。
コベルコ建機が開発中の自動運転システムを搭載したブレーカーショベルと、安藤ハザマが2024年に開発した「あたり検知システム」を連携させることで、従来は重機オペレータと作業員の2名が切羽付近で目視確認しながら行っていた危険な作業の無人化を目指す。
発破後の岩盤を自動検知し最適経路を算出。タブレットから後方で自動運転を指示
あたり取り作業とは、発破後の切羽岩盤に生じた設計断面から内空側に飛び出した岩塊(あたり)をブレーカーショベルで除去する作業で、従来は掘削直後の切羽付近で目視確認を行う必要があるため肌落ち災害のリスクが高い作業だった。
本技術では、あたり検知システムが取得したブレーカーショベルの自己位置・姿勢・あたり箇所などの情報を自動運転システムに入力し、あたり箇所を除去するためのブームとアームの最適な動作経路を自動で算出する。
実証実験では切羽前に無人のブレーカーショベルを配置し、後方からタブレットで自動運転指示を行う形で一連の動作を確認した。
トンネル特有の限られた作業空間においても、自動で動作するブレーカーショベルがトンネル壁面に触れることなくチゼル先端をあたり箇所に適切に誘導できることを確認しており、岩盤を打撃する動作に関する課題の抽出など今後の改良に向けた具体的な検討項目も明確になった。
2024年の土砂積込み自動化に続く展開。遠隔操作との組み合わせで実用化を加速
両社はこれまでにも油圧ショベルの自動運転システムを共同開発し、ダンプトラックへの土砂積込み技術を確立した実績を持つ。
今回はその成果を基盤にブレーカーショベルへ応用を拡大した形で、国土交通省が山岳トンネル工事の施工オートメーション化を推進する流れとも合致している。
今後は遠隔化も組み合わせた自動施工技術によるあたり取り作業の安全性向上を目指し、両社が引き続き技術検証を推進していく方針だ。
WRITTEN by

建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします