オリエンタル白石は、2025年10月に吊り足場上で四足歩行ロボットの稼働試験を実施し、障害物や細かな段差がある環境での自律歩行に成功した。
建設工事現場における生産性向上とウェルビーイング実現に向けて、今後は自動巡回や体調不良者検知の実現を目指す。
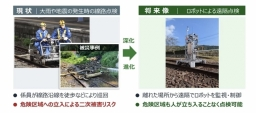
橋梁や高速道路などの工事では高所かつ巨大な建造物の工事となるため、吊り足場が多く使われている。
吊り足場環境は工事現場によっては数百メートルから数キロメートルに及び、また天井が低く、床材と構造物を繋ぐチェーンやワイヤーが一定間隔で設置されていることなどから見通しが悪くなっている。
定点カメラなどでは作業者の体調の変化など、全ての状況を把握することは困難であるため、作業中の安全を確認する巡視が不可欠となっている。
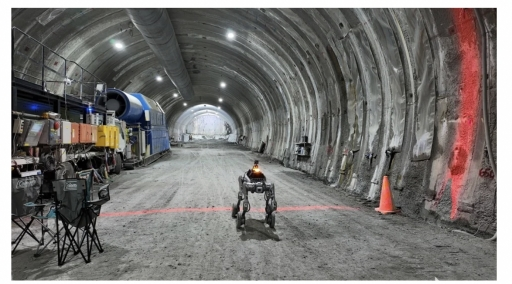
本試験は実際に稼働している工事現場の吊り足場上で実施された。
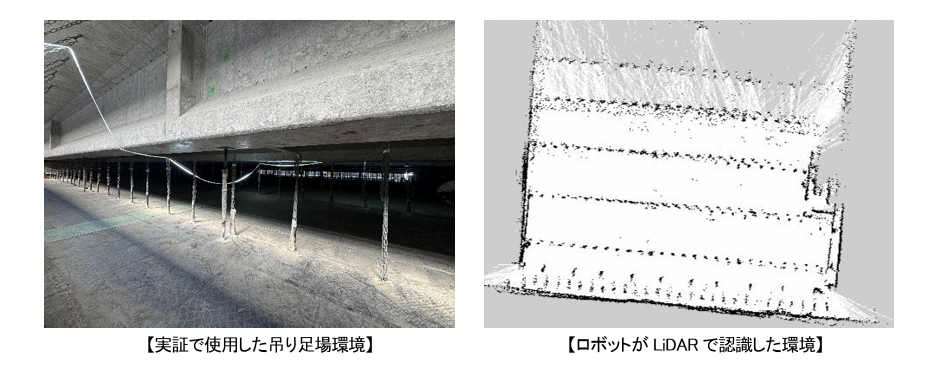
吊り足場全般の特徴として、一枚の大きな床材ではなく細かい床材の集合であるため軽微な段差が多く存在すること、また床材と構造物を繋ぐチェーンやワイヤーなど、LiDARで検知しにくい障害物があることが課題だった。
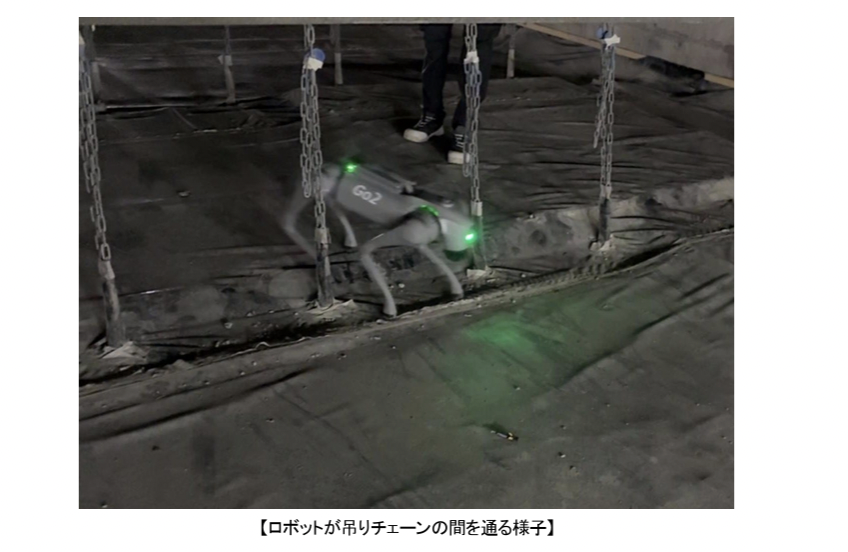
本試験ではUnitree Robotics社の「Go2」という四足歩行ロボットにオリエンタル白石がプログラミングをしたシステムを用いて検証を行った。
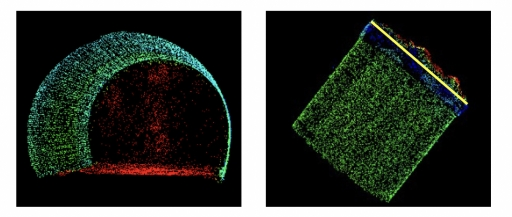
検証の結果、従来LiDARで検知しにくかった細い吊りチェーンを障害物として正確に認識し、接触することなく自律歩行をすることに成功。
また、細かな段差が多数存在する床面でも、バランスを崩すことなく安定して歩行できることを確認できた。
今後は本試験の結果をもとに、工事現場や工場における作業者の体調管理や、夏場の熱中症対策として体調不良者を検知するなど、ウェルビーイングの向上に向けて取り組みを進めていく予定である。
現場担当者は、建設現場の安全を守るうえで重要な「声掛け」や「気づき」は人間にしかできないが、作業員の体調の急な変化などをロボットが検知してくれるとより迅速な対応が取れると期待を寄せている。
建設工事現場における生産性向上とウェルビーイング実現に向けて、今後は自動巡回や体調不良者検知の実現を目指す。
LiDAR検知困難な吊りチェーンを認識し数百メートル級の足場で巡回可能に
橋梁や高速道路などの工事では高所かつ巨大な建造物の工事となるため、吊り足場が多く使われている。
吊り足場環境は工事現場によっては数百メートルから数キロメートルに及び、また天井が低く、床材と構造物を繋ぐチェーンやワイヤーが一定間隔で設置されていることなどから見通しが悪くなっている。
定点カメラなどでは作業者の体調の変化など、全ての状況を把握することは困難であるため、作業中の安全を確認する巡視が不可欠となっている。
本試験は実際に稼働している工事現場の吊り足場上で実施された。
吊り足場全般の特徴として、一枚の大きな床材ではなく細かい床材の集合であるため軽微な段差が多く存在すること、また床材と構造物を繋ぐチェーンやワイヤーなど、LiDARで検知しにくい障害物があることが課題だった。
本試験ではUnitree Robotics社の「Go2」という四足歩行ロボットにオリエンタル白石がプログラミングをしたシステムを用いて検証を行った。
検証の結果、従来LiDARで検知しにくかった細い吊りチェーンを障害物として正確に認識し、接触することなく自律歩行をすることに成功。
また、細かな段差が多数存在する床面でも、バランスを崩すことなく安定して歩行できることを確認できた。
今後は本試験の結果をもとに、工事現場や工場における作業者の体調管理や、夏場の熱中症対策として体調不良者を検知するなど、ウェルビーイングの向上に向けて取り組みを進めていく予定である。
現場担当者は、建設現場の安全を守るうえで重要な「声掛け」や「気づき」は人間にしかできないが、作業員の体調の急な変化などをロボットが検知してくれるとより迅速な対応が取れると期待を寄せている。
WRITTEN by

建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします