

JR東海とエアロセンスがトンネル内で長距離自動飛行が可能なドローンの制御方法を共同開発した。
山梨リニア実験線のトンネル内で飛行試験を実施し、時速約30kmで10km程度の距離を安定して自動飛行できることを確認している。
JR東海では将来の労働力人口減少に対応するためICT等の最新技術を活用し、効率的な業務遂行体制の構築に取り組んでいる。
日々の設備点検や異常時の情報収集は主に係員の目視で行ってきたが、ドローンで取得したデータなどを活用した省力化にも取り組んでいる状況だ。
一般的にドローンは全地球航法衛星システムGNSSを活用して機体の位置を認識しながら飛行させることができる。
しかしトンネル内ではGNSSが使用できないため、センサ等を活用して自らの上下・左右位置と向きを認識し、周囲の構造物と一定の距離をとりながら飛行させる必要がある。
トンネル内での制御方法の一つに3D-LiDARセンサを活用する方法があるが、三次元空間での複雑な情報処理を伴うため時速約10km以下の低速飛行となる。
その結果、長距離の自動飛行が難しく長大なトンネルの設備点検には向かないという課題があった。
今回開発した新しい制御方法では、ドローンに搭載した2個の2D-LiDARセンサで予め指定した飛行位置と実際の飛行位置とのずれを把握する。
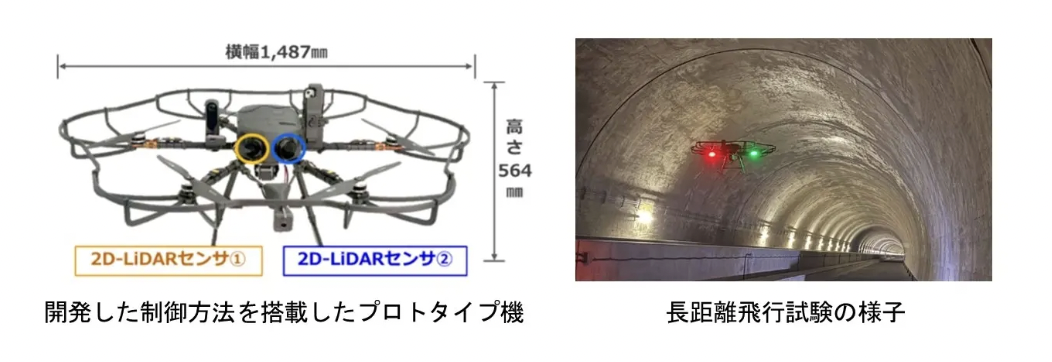
自動で補正しながら飛行する仕組みで、この制御方法は特許出願済みとなっている。
プロトタイプ機で山梨リニア実験線のトンネル内で飛行試験を行い、時速約30kmで10km程度の距離を安定して自動飛行できることを確認した。
今後は新幹線のように架線等の様々な設備・構造物があるトンネル内においても、安定した自動飛行ができるか検証を続ける。
本技術の実用化により長大なトンネルでの点検等の省力化を目指す方針だ。
山梨リニア実験線のトンネル内で飛行試験を実施し、時速約30kmで10km程度の距離を安定して自動飛行できることを確認している。
2個の2D-LiDARセンサで飛行位置のずれを自動補正。3D-LiDARの低速飛行課題を解決
JR東海では将来の労働力人口減少に対応するためICT等の最新技術を活用し、効率的な業務遂行体制の構築に取り組んでいる。
日々の設備点検や異常時の情報収集は主に係員の目視で行ってきたが、ドローンで取得したデータなどを活用した省力化にも取り組んでいる状況だ。
一般的にドローンは全地球航法衛星システムGNSSを活用して機体の位置を認識しながら飛行させることができる。
しかしトンネル内ではGNSSが使用できないため、センサ等を活用して自らの上下・左右位置と向きを認識し、周囲の構造物と一定の距離をとりながら飛行させる必要がある。
トンネル内での制御方法の一つに3D-LiDARセンサを活用する方法があるが、三次元空間での複雑な情報処理を伴うため時速約10km以下の低速飛行となる。
その結果、長距離の自動飛行が難しく長大なトンネルの設備点検には向かないという課題があった。
今回開発した新しい制御方法では、ドローンに搭載した2個の2D-LiDARセンサで予め指定した飛行位置と実際の飛行位置とのずれを把握する。
自動で補正しながら飛行する仕組みで、この制御方法は特許出願済みとなっている。
プロトタイプ機で山梨リニア実験線のトンネル内で飛行試験を行い、時速約30kmで10km程度の距離を安定して自動飛行できることを確認した。
今後は新幹線のように架線等の様々な設備・構造物があるトンネル内においても、安定した自動飛行ができるか検証を続ける。
本技術の実用化により長大なトンネルでの点検等の省力化を目指す方針だ。
WRITTEN by



建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします











































