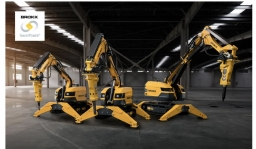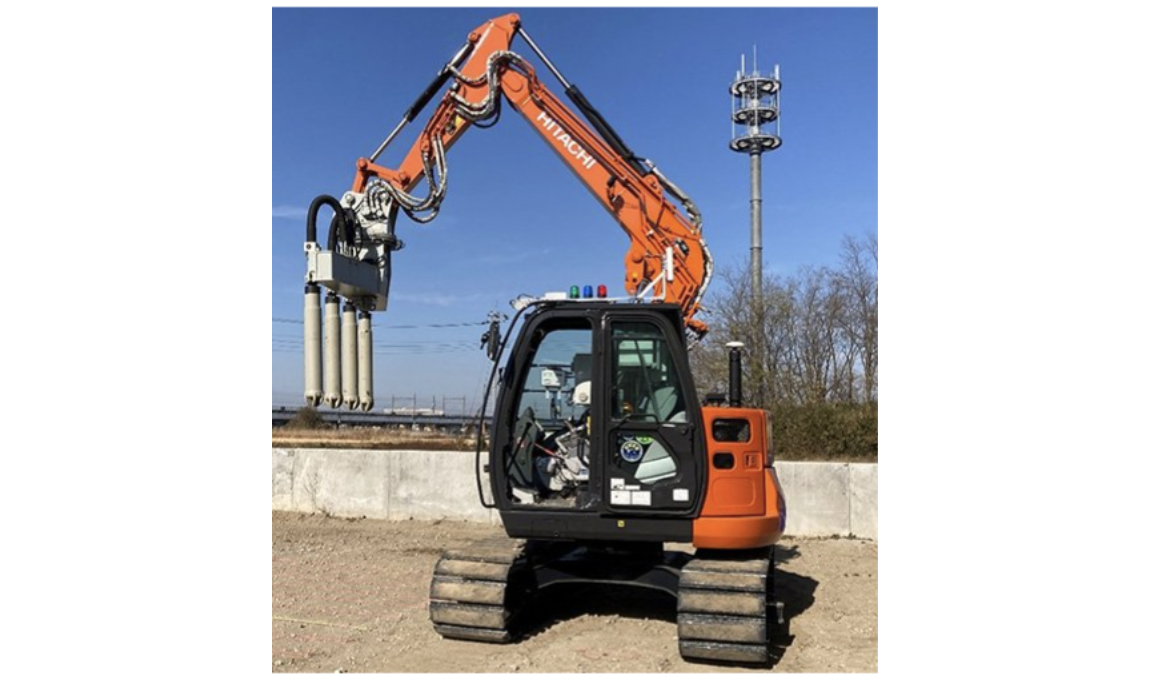

安藤ハザマは2026年3月、ダム堤体コンクリートの締固め作業に使用する油圧ショベル型バイブレータ(バイバック)の遠隔操作と自動運転を実現するシステム「RABV(Remote Automated Backhoe with Vibrator)」を開発し、模擬材を用いた実証実験で各機能の有効性を確認したと発表した。
ダム工事は立地が僻地であることに加え、特殊な技能を要する作業が多い。
熟練技能者の高齢化と就業人口の減少が続く中、省力化・省人化が急務となっており、その中でも特に技能の熟練度が求められるバイバックの操作自動化に取り組んできた。
「RABV」は
の3つで構成されている。
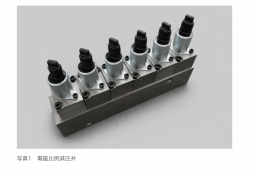
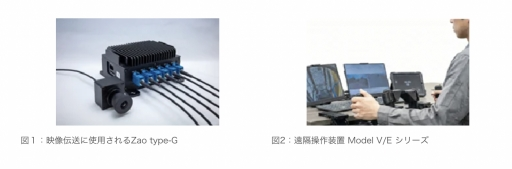
遠隔操作プログラムでは、バイブレータの旋回や振動の開始・停止を専用端末から遠隔で操作できる。
 自動走行プログラムは、堤体コンクリートの打設順序を示すレーンスケジュールをシステム上で再現し、打設箇所を選択するだけでバイバックが自動走行する仕組みだ。
自動走行プログラムは、堤体コンクリートの打設順序を示すレーンスケジュールをシステム上で再現し、打設箇所を選択するだけでバイバックが自動走行する仕組みだ。
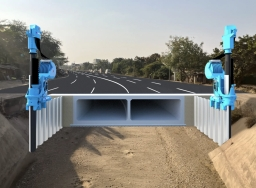
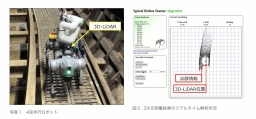
そして自動締固めプログラムでは、バイバックに搭載したLiDARがコンクリートの形状をリアルタイムで認識し、バイブレータの差し込み位置・順序の修正や、コンクリート表面の高さに応じた引き抜きタイミングの判断まで自動で行う。
今回の実証実験では、ダムコンクリートの模擬材を用いて各機能の精度と有効性を確認し、適切な締固めが実施できることを確かめた。
現在の建設業界では、高度な熟練技能を持つオペレーターへの依存から抜け出せない工程が多く残っている。
バイバックによる締固め作業はその典型で、ベテランの暗黙知に頼る施工管理からの脱却が長年の課題だった。
安藤ハザマは今後、さらなる実証実験と国土交通省が定める「自動施工における安全ルール」への適合を進め、実際のダム施工現場への適用を目指す方針だ。
ダム工事は立地が僻地であることに加え、特殊な技能を要する作業が多い。
熟練技能者の高齢化と就業人口の減少が続く中、省力化・省人化が急務となっており、その中でも特に技能の熟練度が求められるバイバックの操作自動化に取り組んできた。
遠隔操作・自動走行・自動締固めの3プログラムを統合。LiDARでコンクリート形状を認識
「RABV」は
- 遠隔操作プログラム
- 自動走行プログラム
- 自動締固めプログラム
の3つで構成されている。
遠隔操作プログラムでは、バイブレータの旋回や振動の開始・停止を専用端末から遠隔で操作できる。
自動走行プログラムは、堤体コンクリートの打設順序を示すレーンスケジュールをシステム上で再現し、打設箇所を選択するだけでバイバックが自動走行する仕組みだ。そして自動締固めプログラムでは、バイバックに搭載したLiDARがコンクリートの形状をリアルタイムで認識し、バイブレータの差し込み位置・順序の修正や、コンクリート表面の高さに応じた引き抜きタイミングの判断まで自動で行う。
専用技能に依存した施工からの脱却へ。実ダム現場への適用を目指す
今回の実証実験では、ダムコンクリートの模擬材を用いて各機能の精度と有効性を確認し、適切な締固めが実施できることを確かめた。
現在の建設業界では、高度な熟練技能を持つオペレーターへの依存から抜け出せない工程が多く残っている。
バイバックによる締固め作業はその典型で、ベテランの暗黙知に頼る施工管理からの脱却が長年の課題だった。
安藤ハザマは今後、さらなる実証実験と国土交通省が定める「自動施工における安全ルール」への適合を進め、実際のダム施工現場への適用を目指す方針だ。
WRITTEN by



建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします