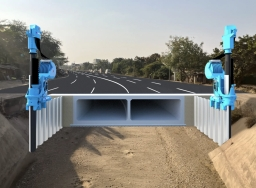
熊谷組(東京都新宿区)は、AI制御システムを用いたアーティキュレートダンプトラック(ADT)の自動走行技術を開発し、ダム現場でのコンクリート構造物埋戻し作業における材料運搬作業で実証したと発表した。
最高速度12.5km/hの教示走行に対して平均速度差-0.85km/hという高い速度追従性を確認しており、工事現場の実運用に十分対応できる精度が実証された。
本技術の核心は「仮想レール方式」と呼ぶ経路決定システムだ。
オペレータが実際に教示運転した際の位置・速度データを「目に見えない仮想のレール」として記録し、自動走行に反映する仕組みで、現場の路面状況や施工状況に合わせた教示通りの走行が可能になる。
人の判断を教示段階で介在させることで、時々刻々と変化する現場環境にも柔軟に対応できる点が特徴だ。
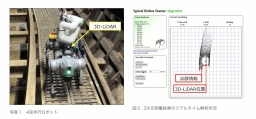
 (制御状態可視化している様子)
(制御状態可視化している様子)
特に難易度が高いのがスイッチバックによる方向転換だ。
ADT特有の中折れ式(アーティキュレート)構造の旋回角度をセンサで取得し、前方車体と後方車体それぞれの位置姿勢を常に認識し続けることで、狭隘な現場でのスイッチバックにも対応した。
実証実験では自動走行ADT1台、遠隔操作バックホウ1台、搭乗操作ブルドーザ1台の計3台を連携させた。
国土交通省の自動施工安全ルールに基づき施工エリアを無人化エリア・有人エリア・中継区域に区分けし、各エリア間の動作をトランシーバーで調整しながら安全に作業を完遂した。
熊谷組は今後、複数台のADT運行管理を可能にする仮想信号式制御システムの開発も進めており、フィジカルAIの導入でさらなる走行の滑らかさと生産性向上を目指す方針だ。
最高速度12.5km/hの教示走行に対して平均速度差-0.85km/hという高い速度追従性を確認しており、工事現場の実運用に十分対応できる精度が実証された。
「仮想レール方式」でオペレータの教示通りに走行。中折れ構造のスイッチバックにも対応
本技術の核心は「仮想レール方式」と呼ぶ経路決定システムだ。
オペレータが実際に教示運転した際の位置・速度データを「目に見えない仮想のレール」として記録し、自動走行に反映する仕組みで、現場の路面状況や施工状況に合わせた教示通りの走行が可能になる。
人の判断を教示段階で介在させることで、時々刻々と変化する現場環境にも柔軟に対応できる点が特徴だ。
(制御状態可視化している様子)特に難易度が高いのがスイッチバックによる方向転換だ。
ADT特有の中折れ式(アーティキュレート)構造の旋回角度をセンサで取得し、前方車体と後方車体それぞれの位置姿勢を常に認識し続けることで、狭隘な現場でのスイッチバックにも対応した。
ADT1台・遠隔バックホウ・搭乗ブルドーザの3台協調で埋戻しを実施
実証実験では自動走行ADT1台、遠隔操作バックホウ1台、搭乗操作ブルドーザ1台の計3台を連携させた。
国土交通省の自動施工安全ルールに基づき施工エリアを無人化エリア・有人エリア・中継区域に区分けし、各エリア間の動作をトランシーバーで調整しながら安全に作業を完遂した。
熊谷組は今後、複数台のADT運行管理を可能にする仮想信号式制御システムの開発も進めており、フィジカルAIの導入でさらなる走行の滑らかさと生産性向上を目指す方針だ。
WRITTEN by

建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします