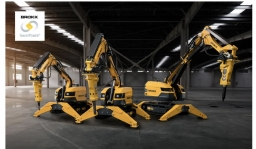
安藤ハザマとコベルコ建機は、自動運転ショベルの実用化を見据えて、施工中の工事現場における長期間の安定運用と安全性の確保について検証を完了した。
両社は2019年4月に共同研究協定を締結し、建設現場の生産性向上と現場無人化による本質的な安全の確保を目的としたシステム開発を進めてきた。
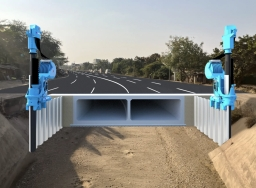
今回の検証は、安藤ハザマが施工中の「R5霞ヶ浦導水石岡トンネル(第3工区)新設工事」において、長期間の安定運用と安全性の確保について実施された。
発注者は国土交通省関東地方整備局霞ヶ浦導水工事事務所で、工期は2023年6月3日から2026年6月30日まで、泥水式シールド工法による延長4,880m、仕上内径3.5mの工事である。

油圧ショベルの自動運転を行い、有人ダンプへの掘削土砂積込作業を繰り返し実施した結果、約2カ月間(2025年4月~6月)にわたる長期運用を実現した。
シールド掘削現場特有の土砂の排出量や土砂質の環境変化に対しては、現場人員がタブレットによる調整機能を使って柔軟に対応する体制を構築した。
また、ダンプトラックの停車位置の変化には、ARマーカなどを使わない新たに開発した物体検知機能で対応し、実工事での長期運用を達成している。
安全面では、国土交通省の「自動施工における安全ルールVer.1.0」に沿ってリスクアセスメントを実施し、無人エリアや中継エリア、立ち入り禁止エリアなどを設定した。
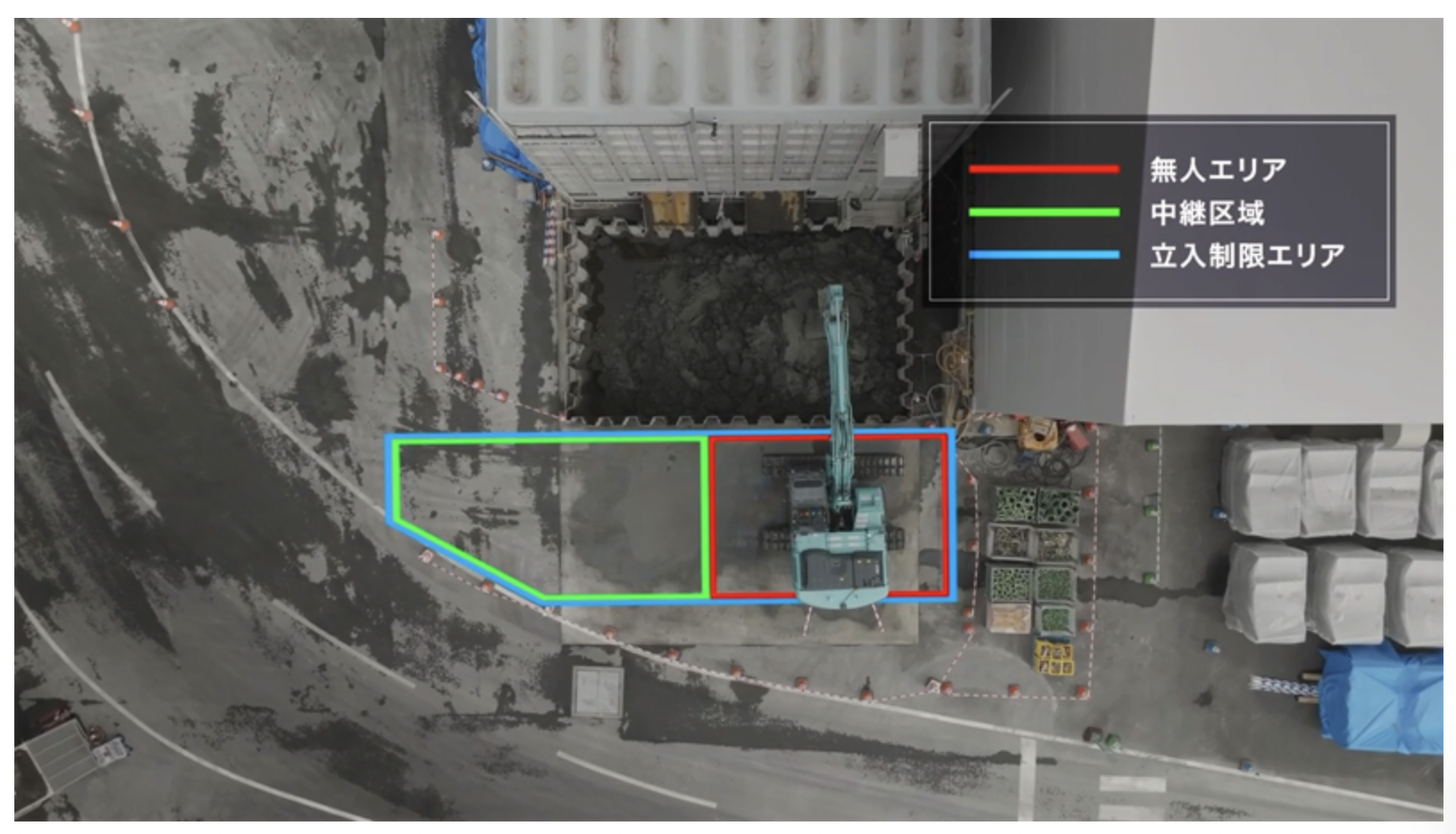
無人エリアでは、「K-DIVE」による遠隔操作と自動運転を組み合わせて無人作業を実現させている。
車両走行路や建屋が近く、十分に自動施工エリアを確保できないなどの課題に対しては、自動運転ショベルによる動作経路逸脱検知機能や、現場に設置したレーザーバリアセンサとの連携などによるエリア監視機能を利用した。
これらの安全対策により、長期に渡る作業を無事故で安全に完了することができた。
これまでの実証を通じて、機能面、安全面、運用面から短期間の自動運転ショベルの稼働は問題なく行えることを確認できていたが、今回の検証により実工事での長期間運用の実現可能性が実証された。
両社は2019年4月に共同研究協定を締結し、建設現場の生産性向上と現場無人化による本質的な安全の確保を目的としたシステム開発を進めてきた。
K-DIVE遠隔操作とARマーカ不要の物体検知機能で泥水式シールド工法に対応
今回の検証は、安藤ハザマが施工中の「R5霞ヶ浦導水石岡トンネル(第3工区)新設工事」において、長期間の安定運用と安全性の確保について実施された。
発注者は国土交通省関東地方整備局霞ヶ浦導水工事事務所で、工期は2023年6月3日から2026年6月30日まで、泥水式シールド工法による延長4,880m、仕上内径3.5mの工事である。
油圧ショベルの自動運転を行い、有人ダンプへの掘削土砂積込作業を繰り返し実施した結果、約2カ月間(2025年4月~6月)にわたる長期運用を実現した。
シールド掘削現場特有の土砂の排出量や土砂質の環境変化に対しては、現場人員がタブレットによる調整機能を使って柔軟に対応する体制を構築した。
また、ダンプトラックの停車位置の変化には、ARマーカなどを使わない新たに開発した物体検知機能で対応し、実工事での長期運用を達成している。
安全面では、国土交通省の「自動施工における安全ルールVer.1.0」に沿ってリスクアセスメントを実施し、無人エリアや中継エリア、立ち入り禁止エリアなどを設定した。
無人エリアでは、「K-DIVE」による遠隔操作と自動運転を組み合わせて無人作業を実現させている。
車両走行路や建屋が近く、十分に自動施工エリアを確保できないなどの課題に対しては、自動運転ショベルによる動作経路逸脱検知機能や、現場に設置したレーザーバリアセンサとの連携などによるエリア監視機能を利用した。
これらの安全対策により、長期に渡る作業を無事故で安全に完了することができた。
これまでの実証を通じて、機能面、安全面、運用面から短期間の自動運転ショベルの稼働は問題なく行えることを確認できていたが、今回の検証により実工事での長期間運用の実現可能性が実証された。
WRITTEN by



建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします