戸田建設は、UP設計コンサルタント、HCI、虎乃門建設機械との協力のもと、山岳トンネル発破作業の安全性向上を目的とした爆薬装填ロボット「To-RIGGER(トリガー)」を開発した。
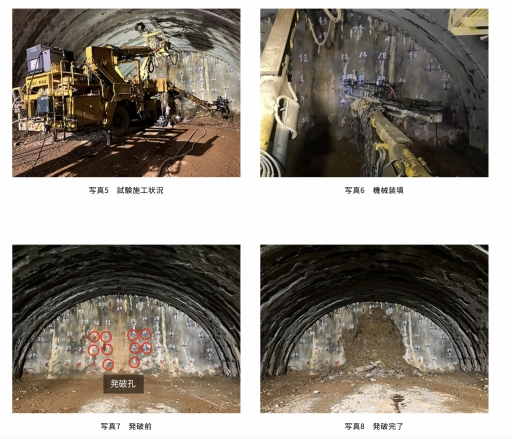
模擬岩盤を用いた検証実験により、3種類の角度の装薬孔に対して爆薬装填ホースを高精度に自動挿入できることを実証している。
従来の爆薬装填作業は、作業員が直接切羽に立ち入り手作業で行うため、岩塊落下などの危険性が高く、遠隔化や自動化が強く求められていた。
装填作業の自動化には、装薬孔に対して位置・角度を正確に合わせたうえで、爆薬装填ホースを高精度に挿入することが不可欠であり、装薬孔の位置把握や挿入時の精度確保が課題となっていた。
開発したTo-RIGGERは、コンピュータジャンボと爆薬装填ホース自動挿入装置で構成される。

削孔時に得た装薬孔の孔口と孔尻の座標データに基づき、コンピュータジャンボの制御によりブームが自動で移動し、先端の受け架台を装薬孔の軸方向に対して平行となるよう角度を調整しつつ、孔口の位置に合わせる。
受け架台の先端に搭載した爆薬装填ホース自動挿入装置が、AIロボットアームを用いて装薬孔の位置を正確に検知し、ホースを高精度に自動挿入する仕組みである。
検証実験では、岩盤面に対して90度の通常孔、60度の芯抜き想定孔、斜め上向きの外周孔想定という3種類の装薬孔すべてにおいて、ホースを高精度に自動挿入できることを確認した。
実験は虎乃門建設機械千葉工場で実施され、発注機関や研究機関から約30名の視察があった。
今後は、現場製造バルクエマルジョン爆薬や無線発破システムと連携し、発破作業の完全自動化を目指す方針である。
模擬岩盤を用いた検証実験により、3種類の角度の装薬孔に対して爆薬装填ホースを高精度に自動挿入できることを実証している。
コンピュータジャンボとAIロボットアームで切羽作業を無人化
従来の爆薬装填作業は、作業員が直接切羽に立ち入り手作業で行うため、岩塊落下などの危険性が高く、遠隔化や自動化が強く求められていた。
装填作業の自動化には、装薬孔に対して位置・角度を正確に合わせたうえで、爆薬装填ホースを高精度に挿入することが不可欠であり、装薬孔の位置把握や挿入時の精度確保が課題となっていた。
開発したTo-RIGGERは、コンピュータジャンボと爆薬装填ホース自動挿入装置で構成される。
削孔時に得た装薬孔の孔口と孔尻の座標データに基づき、コンピュータジャンボの制御によりブームが自動で移動し、先端の受け架台を装薬孔の軸方向に対して平行となるよう角度を調整しつつ、孔口の位置に合わせる。
受け架台の先端に搭載した爆薬装填ホース自動挿入装置が、AIロボットアームを用いて装薬孔の位置を正確に検知し、ホースを高精度に自動挿入する仕組みである。
検証実験では、岩盤面に対して90度の通常孔、60度の芯抜き想定孔、斜め上向きの外周孔想定という3種類の装薬孔すべてにおいて、ホースを高精度に自動挿入できることを確認した。
実験は虎乃門建設機械千葉工場で実施され、発注機関や研究機関から約30名の視察があった。
今後は、現場製造バルクエマルジョン爆薬や無線発破システムと連携し、発破作業の完全自動化を目指す方針である。
WRITTEN by

建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします