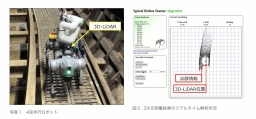
アーキット合同会社(札幌市北区)と植村建設(北海道赤平市)は2026年3月、遠隔操縦による無人化施工や有人現場の安全管理を支援するシステム「FOLLOW EYE」を共同開発したと発表した。
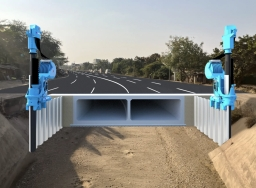
現場のカメラ映像をAIで解析して移動重機を自動追尾し、重機同士や人の接近を検知して警報を発することで、遠隔操縦における省人化と安全管理の高度化を実現する。
建設業界では就業者の高齢化や人手不足を背景に、ICTを活用した無人化施工の試行が進められている。
しかし従来の重機の遠隔操縦では、接触事故の防止や周囲の安全確認のため、遠隔操縦オペレーターとは別に「カメラ操作オペレーター」を配置し、手動でカメラの方向を調整する必要があった。
今回開発された「FOLLOW EYE」は、現場のカメラ映像をAIが画像解析し、移動する重機を自動で追尾する。
さらに、重機や車両同士の接近、危険エリアへの人の侵入を検知して通知・警報を出す機能を備えており、これまで人手に頼っていたカメラ操作や安全監視業務の自動化を強力に支援する。
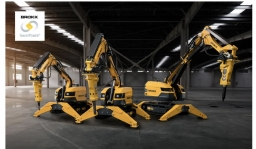
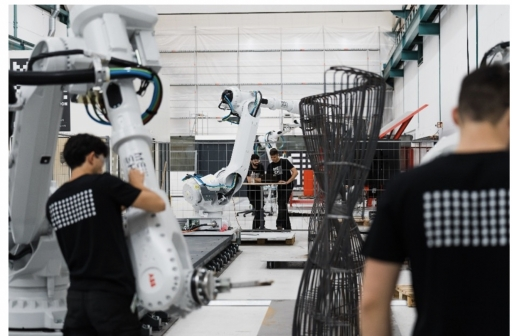
本システムは、バックホウだけでなく、キャリアダンプ、ブルドーザー、ホイールローダー、ロードローラーなど、建設現場で稼働する代表的な重機すべてに対応を想定している。
遠隔操縦下において複数種類の重機をAIで判別・追尾する機能は世界初(同社調べ)の試みとなる。
植村建設が運営する遠隔操縦の実証実験フィールド「UNiCON FIELD」や実際の現場で改良が重ねられており、無人化施工の省人化・生産性向上のみならず、一般的な有人現場における接触事故防止など、幅広い安全管理への応用が期待されている。
現場のカメラ映像をAIで解析して移動重機を自動追尾し、重機同士や人の接近を検知して警報を発することで、遠隔操縦における省人化と安全管理の高度化を実現する。
遠隔操縦に不可欠だった「カメラ操作オペレーター」をAIで代替
建設業界では就業者の高齢化や人手不足を背景に、ICTを活用した無人化施工の試行が進められている。
しかし従来の重機の遠隔操縦では、接触事故の防止や周囲の安全確認のため、遠隔操縦オペレーターとは別に「カメラ操作オペレーター」を配置し、手動でカメラの方向を調整する必要があった。
今回開発された「FOLLOW EYE」は、現場のカメラ映像をAIが画像解析し、移動する重機を自動で追尾する。
さらに、重機や車両同士の接近、危険エリアへの人の侵入を検知して通知・警報を出す機能を備えており、これまで人手に頼っていたカメラ操作や安全監視業務の自動化を強力に支援する。
複数種類の重機に対応、有人現場の安全管理にも
本システムは、バックホウだけでなく、キャリアダンプ、ブルドーザー、ホイールローダー、ロードローラーなど、建設現場で稼働する代表的な重機すべてに対応を想定している。
遠隔操縦下において複数種類の重機をAIで判別・追尾する機能は世界初(同社調べ)の試みとなる。
植村建設が運営する遠隔操縦の実証実験フィールド「UNiCON FIELD」や実際の現場で改良が重ねられており、無人化施工の省人化・生産性向上のみならず、一般的な有人現場における接触事故防止など、幅広い安全管理への応用が期待されている。
WRITTEN by


建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします