

竹中工務店、NTTドコモビジネス、アスラテックの3社は、空間IDを活用した建設現場のロボット運用システム「ロボットナビゲーションシステム」を開発した。
3次元位置情報を組み合わせることで建設現場内におけるロボットの自律移動を可能にし、実証実験では業務時間を約30%削減する効果を確認した。
本システムはNTTドコモビジネスが展開する建設現場の作業間調整を支援するサービス「tateras作業間調整」と、空間IDの3次元位置情報を組み合わせて開発された。
空間IDは経済産業省などが策定を進めているデータ規格で、3次元空間を立方体(ボクセル)に分割し、各ボクセルに固有のIDを割り当てることで地球上のあらゆる位置が特定できる技術である。
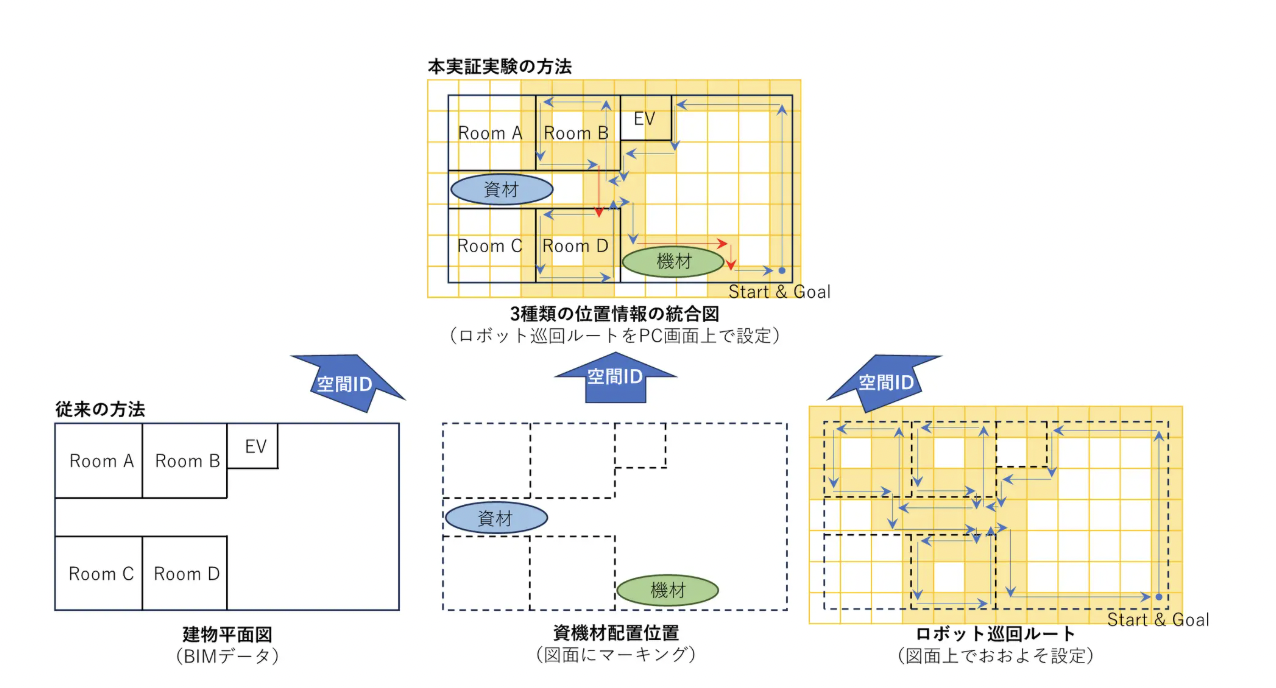
システムは「tateras作業間調整」に入力される建設現場の図面および施工管理情報をもとにマップを構築し、空間IDを活用してロボットの移動ルートを設定する。
日々の工程に応じて変化する立入禁止区域や養生エリアなど、ロボットの点群マップだけでは走行可否判断が難しい建設現場においても、高精度なルート計画および自律移動が実現できる。
ロボットの移動空間に対しては3次元空間上の位置を指定可能な空間IDを用いることで、屋内外や上下階の移動が生じる複雑な建設現場においても各エリアで生成されたマップを統合し、シームレスな自律移動を行う。
空間IDをシステム間連携の共通言語として活用することで、異なる種類のロボットや複数台のロボットの同時運用も実現する。
竹中工務店の建設現場で実施した実証実験では、本システムを用いたロボットの巡回作業により現場職員の確認作業の負担が軽減され、業務時間を約30%削減できた。
また、空間IDをシステム間の共通言語として活用することで、ロボットのシステム開発コストも約30%の削減が可能である。
3社は2022年から空間IDを活用したロボット運用システムの開発に着手し、四足歩行ロボット「Spot(スポット)」などを用いて建設現場を巡回させる実証実験を実施してきた。
今後はこれまでの実証実験で得られた課題を解決し、2027年の実用化を目指すとしている。
3次元位置情報を組み合わせることで建設現場内におけるロボットの自律移動を可能にし、実証実験では業務時間を約30%削減する効果を確認した。
実証実験で業務時間30%削減とシステム開発コスト30%削減を実現
本システムはNTTドコモビジネスが展開する建設現場の作業間調整を支援するサービス「tateras作業間調整」と、空間IDの3次元位置情報を組み合わせて開発された。
空間IDは経済産業省などが策定を進めているデータ規格で、3次元空間を立方体(ボクセル)に分割し、各ボクセルに固有のIDを割り当てることで地球上のあらゆる位置が特定できる技術である。
システムは「tateras作業間調整」に入力される建設現場の図面および施工管理情報をもとにマップを構築し、空間IDを活用してロボットの移動ルートを設定する。
日々の工程に応じて変化する立入禁止区域や養生エリアなど、ロボットの点群マップだけでは走行可否判断が難しい建設現場においても、高精度なルート計画および自律移動が実現できる。
ロボットの移動空間に対しては3次元空間上の位置を指定可能な空間IDを用いることで、屋内外や上下階の移動が生じる複雑な建設現場においても各エリアで生成されたマップを統合し、シームレスな自律移動を行う。
空間IDをシステム間連携の共通言語として活用することで、異なる種類のロボットや複数台のロボットの同時運用も実現する。
竹中工務店の建設現場で実施した実証実験では、本システムを用いたロボットの巡回作業により現場職員の確認作業の負担が軽減され、業務時間を約30%削減できた。
また、空間IDをシステム間の共通言語として活用することで、ロボットのシステム開発コストも約30%の削減が可能である。
3社は2022年から空間IDを活用したロボット運用システムの開発に着手し、四足歩行ロボット「Spot(スポット)」などを用いて建設現場を巡回させる実証実験を実施してきた。
今後はこれまでの実証実験で得られた課題を解決し、2027年の実用化を目指すとしている。
WRITTEN by


建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします












































