
ニュース
Chart社、水陸両用「ヒレロボット」開発開始。災害現場から宇宙探査まで一つの機構で移動

Chartが水陸両用移動ロボット「ヒレロボット」の開発を開始した。
ヒレを用いた独自の移動機構により、水中・陸上の両方をモード切替なしにシームレスに移動できる特徴を持ち、災害現場から宇宙探査まで幅広い用途での活用を想定している。
従来の多くの水陸両用ロボットは、水中ではスクリューやフィン、陸上では車輪や歩行といった具合に異なる移動形態に切り替える必要があった。
ヒレロボットは一種類のヒレ状アクチュエータで推進をまかなうため、モード切替なしに連続した走破が可能となっている。
この機構により一つの機体で様々な現場環境に柔軟に対応できることが特長である。
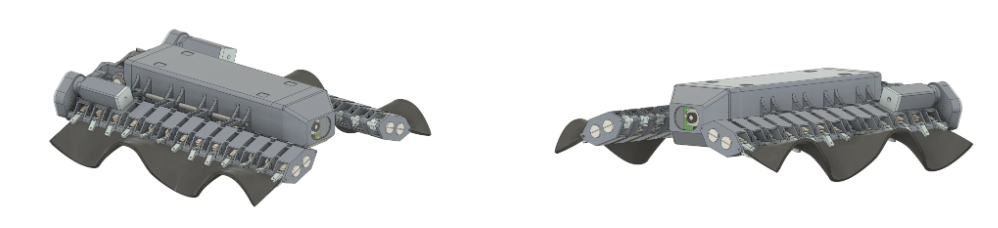
現在は全長約30cmの小型モデルを開発済みで、今後はより大型のモデルの開発を目指し、長時間探査・災害救助などへの応用を計画している。
水中での推進性能では、柔軟なヒレの波打つ動きによって水中でも安定した推進力を発生させることが可能である。
スクリューのような回転機構を使わず流体の中を滑らかに進むため、濁流・浮遊物・障害物が存在する水中環境でも推進力が失われにくく、障害物との接触による故障リスクが低減される。
水中からそのまま陸上へと移行する連続的な移動も実現している。
内部バッテリーによる完全独立電源と無線通信により、ケーブルを引きずる必要がなく、入り組んだ空間や障害物の多い現場でも自在に動き回ることができる。
配線に絡まる心配がないため、複雑な配管・瓦礫下での安定した遠隔操作が可能となっている。
ヒレを波打たせる独自の移動機構により、氷上・砂地・泥濘地・瓦礫上・配管内部など、従来の車輪・クローラ型では困難な環境下でも安定して移動できる。

地形が急激に変化する災害現場などでは、臨機応変にその場の環境に適応して踏破を継続できる特性がある。
宇宙探査用途では、エウロパ・エンケラドスなど氷下海洋探査での氷・水・岩場が混在する極限環境下での地質・生命痕跡探査用途への応用が想定されている。
火星地下空洞・溶岩管探査や月面基地周辺の安全確認など、狭い場所や足を取られやすい柔らかいレゴリス堆積地などでの自立探査にも活用が期待される。
被災地での瓦礫下状況の確認・生存者探索・安全確認では、地震・爆発事故・津波などで倒壊・浸水した現場に即座に投入できる。
瓦礫の隙間や浸水エリアに入り込み、人が踏み込む前の安全確認や二次災害リスクの評価を行うことが可能である。

水中資源探査・調査では、水中資源の位置情報のマッピングを低予算、高精度で探査でき、ダム・堤体内部調査にも活用できる。
原子力施設の廃炉現場点検や火山火口縁の状況観測など、高放射線・高温等の極限環境での遠隔計測にも対応している。
参考・画像元:Chartプレスリリースより
ヒレを用いた独自の移動機構により、水中・陸上の両方をモード切替なしにシームレスに移動できる特徴を持ち、災害現場から宇宙探査まで幅広い用途での活用を想定している。
ヒレ状アクチュエータで複雑地形と水中環境に対応する推進機構
従来の多くの水陸両用ロボットは、水中ではスクリューやフィン、陸上では車輪や歩行といった具合に異なる移動形態に切り替える必要があった。
ヒレロボットは一種類のヒレ状アクチュエータで推進をまかなうため、モード切替なしに連続した走破が可能となっている。
この機構により一つの機体で様々な現場環境に柔軟に対応できることが特長である。
現在は全長約30cmの小型モデルを開発済みで、今後はより大型のモデルの開発を目指し、長時間探査・災害救助などへの応用を計画している。
水中での推進性能では、柔軟なヒレの波打つ動きによって水中でも安定した推進力を発生させることが可能である。
スクリューのような回転機構を使わず流体の中を滑らかに進むため、濁流・浮遊物・障害物が存在する水中環境でも推進力が失われにくく、障害物との接触による故障リスクが低減される。
水中からそのまま陸上へと移行する連続的な移動も実現している。
内部バッテリーによる完全独立電源と無線通信により、ケーブルを引きずる必要がなく、入り組んだ空間や障害物の多い現場でも自在に動き回ることができる。
配線に絡まる心配がないため、複雑な配管・瓦礫下での安定した遠隔操作が可能となっている。
ヒレを波打たせる独自の移動機構により、氷上・砂地・泥濘地・瓦礫上・配管内部など、従来の車輪・クローラ型では困難な環境下でも安定して移動できる。
地形が急激に変化する災害現場などでは、臨機応変にその場の環境に適応して踏破を継続できる特性がある。
宇宙探査用途では、エウロパ・エンケラドスなど氷下海洋探査での氷・水・岩場が混在する極限環境下での地質・生命痕跡探査用途への応用が想定されている。
火星地下空洞・溶岩管探査や月面基地周辺の安全確認など、狭い場所や足を取られやすい柔らかいレゴリス堆積地などでの自立探査にも活用が期待される。
被災地での瓦礫下状況の確認・生存者探索・安全確認では、地震・爆発事故・津波などで倒壊・浸水した現場に即座に投入できる。
瓦礫の隙間や浸水エリアに入り込み、人が踏み込む前の安全確認や二次災害リスクの評価を行うことが可能である。
水中資源探査・調査では、水中資源の位置情報のマッピングを低予算、高精度で探査でき、ダム・堤体内部調査にも活用できる。
原子力施設の廃炉現場点検や火山火口縁の状況観測など、高放射線・高温等の極限環境での遠隔計測にも対応している。
参考・画像元:Chartプレスリリースより
WRITTEN by


建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします












































