大成建設は、GPS等の位置情報が届かないトンネル坑内において、10t積ダンプトラックの実用速度(時速20km)での自動運転に成功したと発表した。
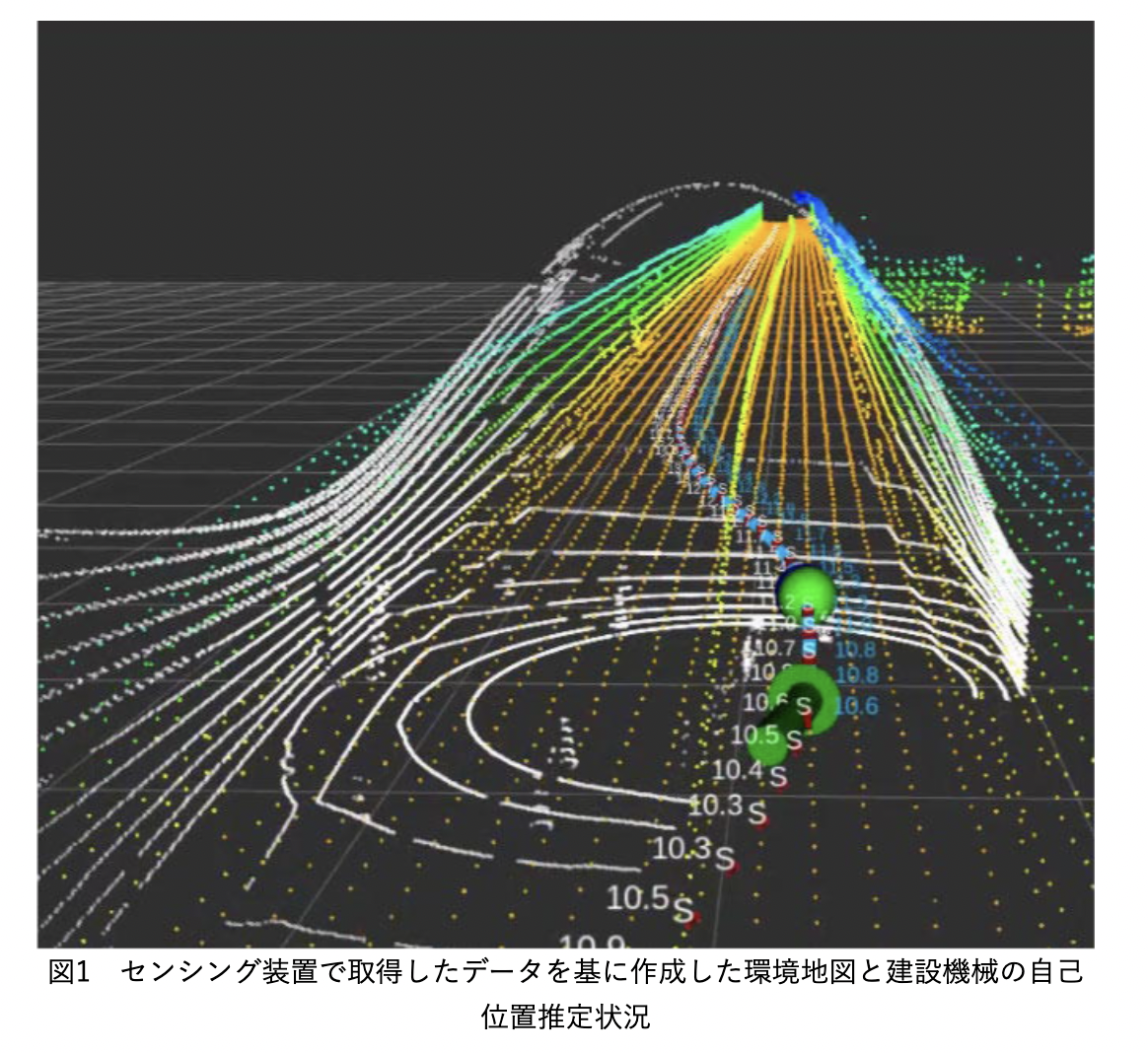
開発された位置情報取得技術「T-iDraw Map」は、SLAM(Simultaneous Localization And Mapping)技術を活用したもので、建設機械や工事用車両に搭載したセンシング装置による計測情報を基に、車体の周辺環境を示す「環境地図作成」と「自己位置推定」を3次元で同時に行う。
この技術により、GPSを含むGNSS(Global Navigation Satellite System)が利用できない環境でも、随時位置情報を取得しながら、建設現場の周辺環境変化に適応した自動運転が可能となる。
大成建設では2021年に「T-iDraw Map」を開発し、これまでトンネル坑内においてキャタピラー式無人建設機械(クローラダンプ)の自動運転を実現してきた。
今回の実証では、より実用性の高いタイヤ式工事用車両である10t積ダンプトラックに本技術を適用し、性能を確認した。
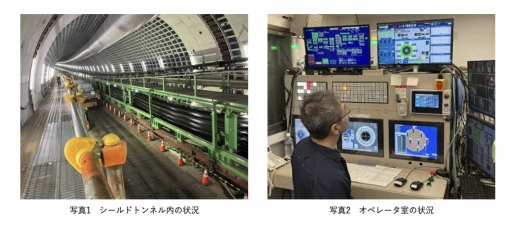
実証実験は、国土交通省国土技術政策総合研究所に設置された実大トンネル実験施設および利賀トンネル(2工区)工事(発注者:国土交通省北陸地方整備局)のトンネル建設現場で行われた。
ダンプトラックは、トンネル坑内の周辺環境を示すデータを基に車体の位置情報を取得しながら、あらかじめ設定したルートを自動走行した。
GNSSを利用できない坑内や地下環境でも実用速度である時速20kmでの自動運転が可能であることが確認され、特にトンネル坑内特有の移動式鋼製型枠(セントル)設置区間などの狭隘な区間においても、通過速度を減速し安全に走行することができた。
本技術の基盤となるSLAM技術は、家電総合メーカーパナソニック株式会社の関連会社である、パナソニック アドバンストテクノロジー株式会社のシステムを活用している。
自己位置推定と環境地図作成を同時に行う仕組みでは、移動体が「センシングによって得た計測値」と「移動することで得た計測値」を照らし合わせ、その誤差を収束計算することで、作成した地図上に自己位置を推定する。
大成建設は今後、現在施工中のトンネル建設現場に「T-iDraw Map」を活用した建設機械や工事用車両の自動運転技術を順次導入する予定だ。

将来的には屋内や地下での自動運転のほか、災害発生時における探査・点検などへの適用拡大を目指すとしている。
また、同社が開発した建設作業用ロボットシリーズ「T-iROBOシリーズ」にも本技術を積極的に展開し、無人・有人の建設機械が協調して稼働する「T-iCraft」との連携も図りながら、安全性・生産性の向上を推進するという。
「T-iDraw Map」で周辺環境の3D地図作成と自己位置推定を同時実行、狭隘区間でも安全に減速・通過
開発された位置情報取得技術「T-iDraw Map」は、SLAM(Simultaneous Localization And Mapping)技術を活用したもので、建設機械や工事用車両に搭載したセンシング装置による計測情報を基に、車体の周辺環境を示す「環境地図作成」と「自己位置推定」を3次元で同時に行う。
この技術により、GPSを含むGNSS(Global Navigation Satellite System)が利用できない環境でも、随時位置情報を取得しながら、建設現場の周辺環境変化に適応した自動運転が可能となる。
大成建設では2021年に「T-iDraw Map」を開発し、これまでトンネル坑内においてキャタピラー式無人建設機械(クローラダンプ)の自動運転を実現してきた。
今回の実証では、より実用性の高いタイヤ式工事用車両である10t積ダンプトラックに本技術を適用し、性能を確認した。
実証実験は、国土交通省国土技術政策総合研究所に設置された実大トンネル実験施設および利賀トンネル(2工区)工事(発注者:国土交通省北陸地方整備局)のトンネル建設現場で行われた。
ダンプトラックは、トンネル坑内の周辺環境を示すデータを基に車体の位置情報を取得しながら、あらかじめ設定したルートを自動走行した。
GNSSを利用できない坑内や地下環境でも実用速度である時速20kmでの自動運転が可能であることが確認され、特にトンネル坑内特有の移動式鋼製型枠(セントル)設置区間などの狭隘な区間においても、通過速度を減速し安全に走行することができた。
本技術の基盤となるSLAM技術は、家電総合メーカーパナソニック株式会社の関連会社である、パナソニック アドバンストテクノロジー株式会社のシステムを活用している。
自己位置推定と環境地図作成を同時に行う仕組みでは、移動体が「センシングによって得た計測値」と「移動することで得た計測値」を照らし合わせ、その誤差を収束計算することで、作成した地図上に自己位置を推定する。
大成建設は今後、現在施工中のトンネル建設現場に「T-iDraw Map」を活用した建設機械や工事用車両の自動運転技術を順次導入する予定だ。
将来的には屋内や地下での自動運転のほか、災害発生時における探査・点検などへの適用拡大を目指すとしている。
また、同社が開発した建設作業用ロボットシリーズ「T-iROBOシリーズ」にも本技術を積極的に展開し、無人・有人の建設機械が協調して稼働する「T-iCraft」との連携も図りながら、安全性・生産性の向上を推進するという。
WRITTEN by

建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします