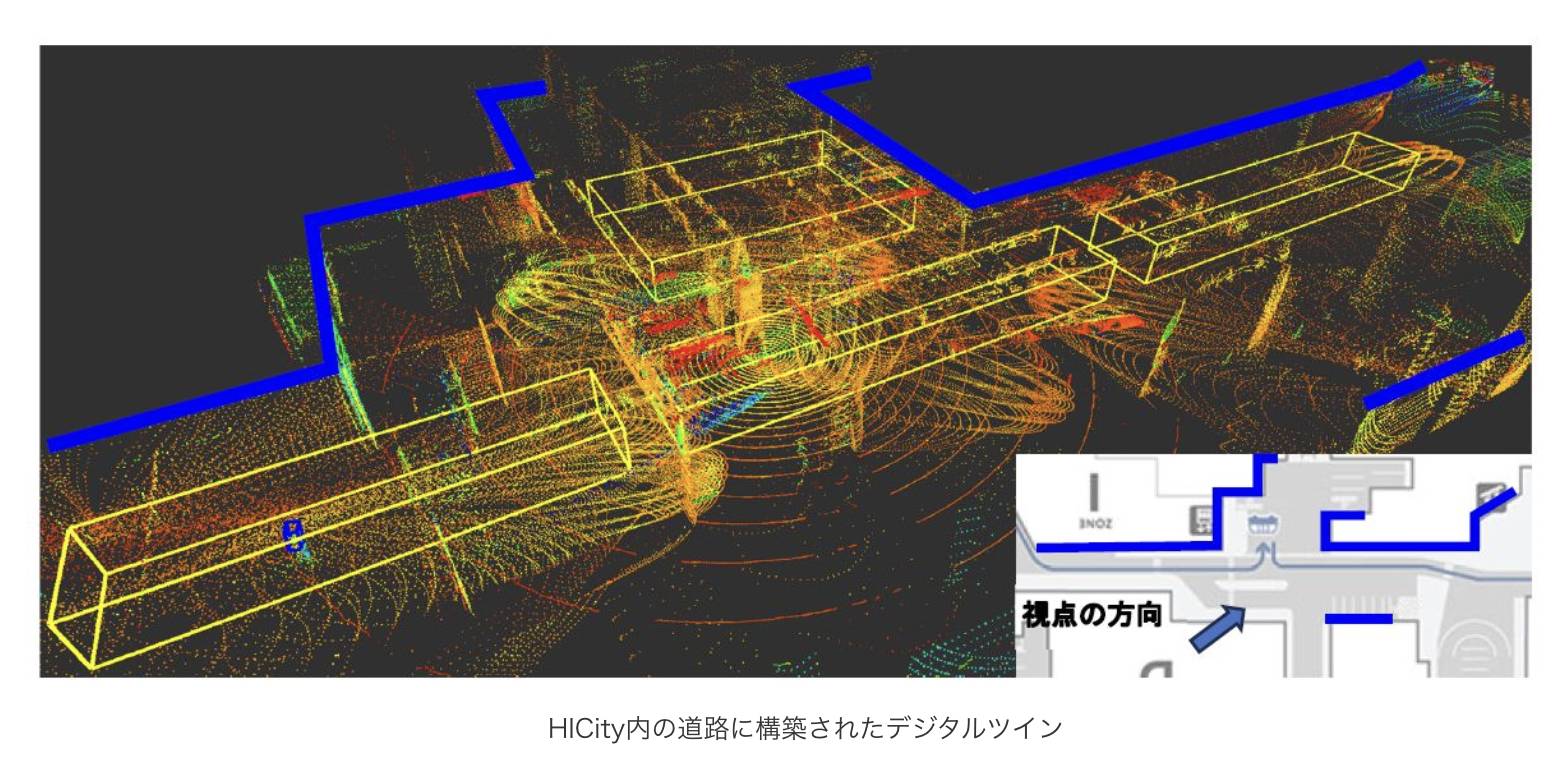
鹿島建設とハイパーデジタルツインは、HANEDA INNOVATION CITYでデジタルツインを活用したロボットの道路横断制御システムの実証実験に成功した。
複数のLiDARセンサーから取得した動体データをエッジコンピュータでリアルタイム解析し、3Dマップを自動更新する。
ロボットに搭載されたカメラやセンサーでは認識できない離れた位置や死角からの接近者を把握できる。
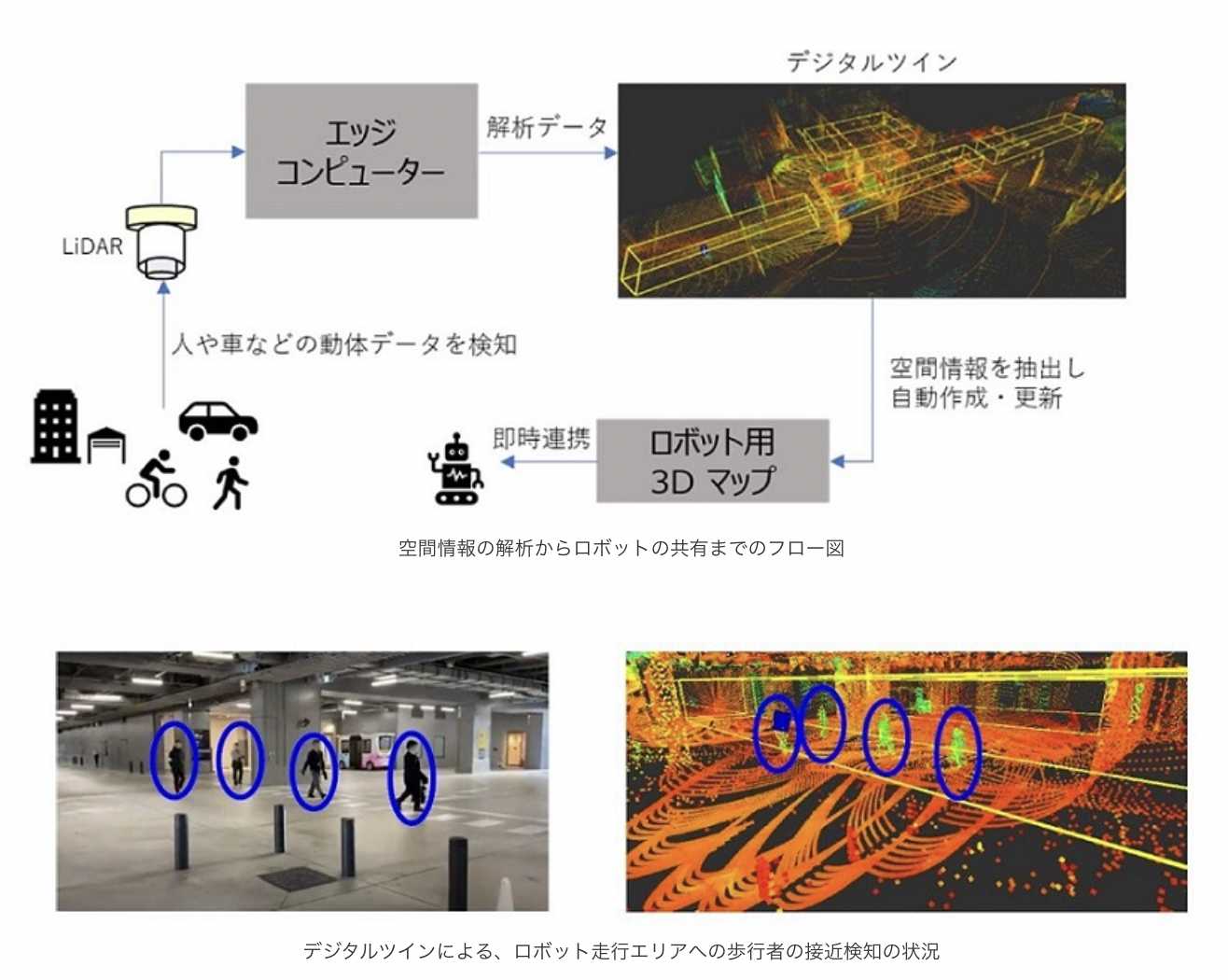
システムはロボット統合管制システムと連携し、危険を検知した際は自動で安全な位置に停止する。
環境変更にも即時対応可能な3Dマップの自動更新機能により、初めての走行ルートでも安全な自動制御を実現した。
今後は他の大規模施設への展開を視野に、警備・運搬・搬送業務での実用化を目指す。
建物設置型LiDARで死角の歩行者を検知
複数のLiDARセンサーから取得した動体データをエッジコンピュータでリアルタイム解析し、3Dマップを自動更新する。
ロボットに搭載されたカメラやセンサーでは認識できない離れた位置や死角からの接近者を把握できる。
システムはロボット統合管制システムと連携し、危険を検知した際は自動で安全な位置に停止する。
環境変更にも即時対応可能な3Dマップの自動更新機能により、初めての走行ルートでも安全な自動制御を実現した。
今後は他の大規模施設への展開を視野に、警備・運搬・搬送業務での実用化を目指す。
参考・画像元:鹿島建設プレスリリースより
WRITTEN by

建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします