イクシスと鴻池組は、橋脚の耐震補強工事における表面処理作業を自動で行う建設ロボットを共同開発したと発表した。
12月11日と12日に実物大試験体での公開試験を実施している。
ロボットは橋脚を把持して昇降する昇降ユニットと、表面処理を行う研掃ユニットで構成される。
昇降ユニットは4箇所の車輪で橋脚を把持し、50~100mm/秒の速度で自律走行が可能である。
電源や空圧喪失時の安全装置を搭載し、落下防止機能を備えている。
研掃ユニットには大型化したブラストガンを搭載し、従来比約2倍の研掃能力を実現した。
2セットの研掃ユニットにより二面同時研掃が可能で、60~80mm/秒の速度で水平移動する。
本技術により作業員数の削減、品質の安定化、粉じん飛散防止、高所作業の解消を実現する。
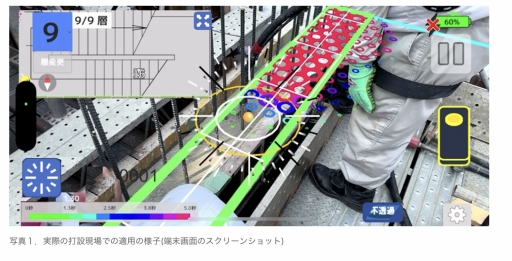
 (公開試験の様子)
(公開試験の様子)
公開試験には国土交通省や道路事業者など約60名が参加し、実用化に向けた課題抽出を行った。
今後は橋脚補強以外にも塗膜除去や点検など、インフラ維持管理での活用を目指す。
12月11日と12日に実物大試験体での公開試験を実施している。
昇降機能と研掃機能を搭載し安全性を確保
ロボットは橋脚を把持して昇降する昇降ユニットと、表面処理を行う研掃ユニットで構成される。
昇降ユニットは4箇所の車輪で橋脚を把持し、50~100mm/秒の速度で自律走行が可能である。
電源や空圧喪失時の安全装置を搭載し、落下防止機能を備えている。
研掃ユニットには大型化したブラストガンを搭載し、従来比約2倍の研掃能力を実現した。
2セットの研掃ユニットにより二面同時研掃が可能で、60~80mm/秒の速度で水平移動する。
本技術により作業員数の削減、品質の安定化、粉じん飛散防止、高所作業の解消を実現する。
(公開試験の様子)公開試験には国土交通省や道路事業者など約60名が参加し、実用化に向けた課題抽出を行った。
今後は橋脚補強以外にも塗膜除去や点検など、インフラ維持管理での活用を目指す。
参考・画像元:株式会社イクシスプレスリリースより
WRITTEN by



建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします