川崎重工業は建設現場の溝堀作業を自動化する「ショベル自律施工システム」を開発したと発表した。
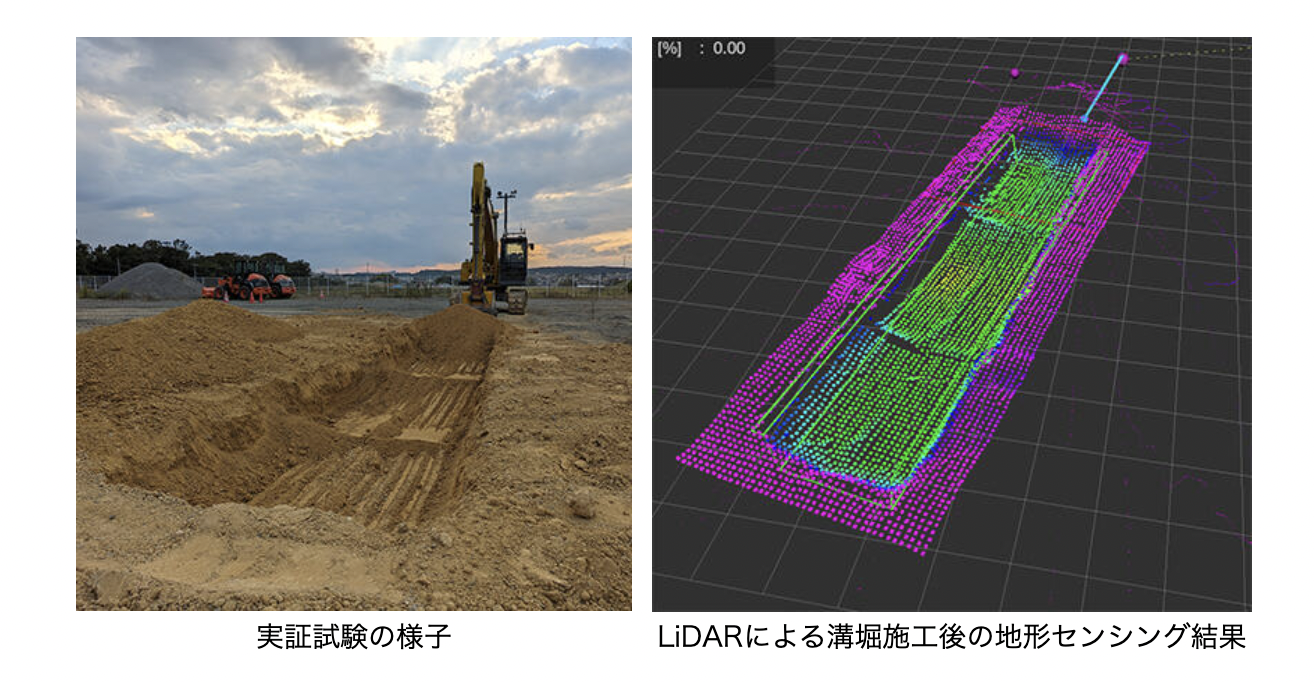
3次元設計データとLiDARによる地形センシングを組み合わせ、掘削作業を自律制御する。
システムはショベルに搭載したコントローラーが掘削量を自動判断し、効率的な作業を計画する。
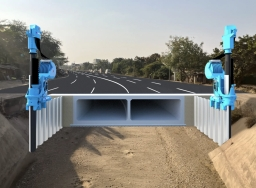
実証試験では幅2m、深さ0.6m、長さ10mの溝を自律施工できることを確認した。
掘削だけでなく溝床面の水平均しや押し固め作業も自動で実行可能である。
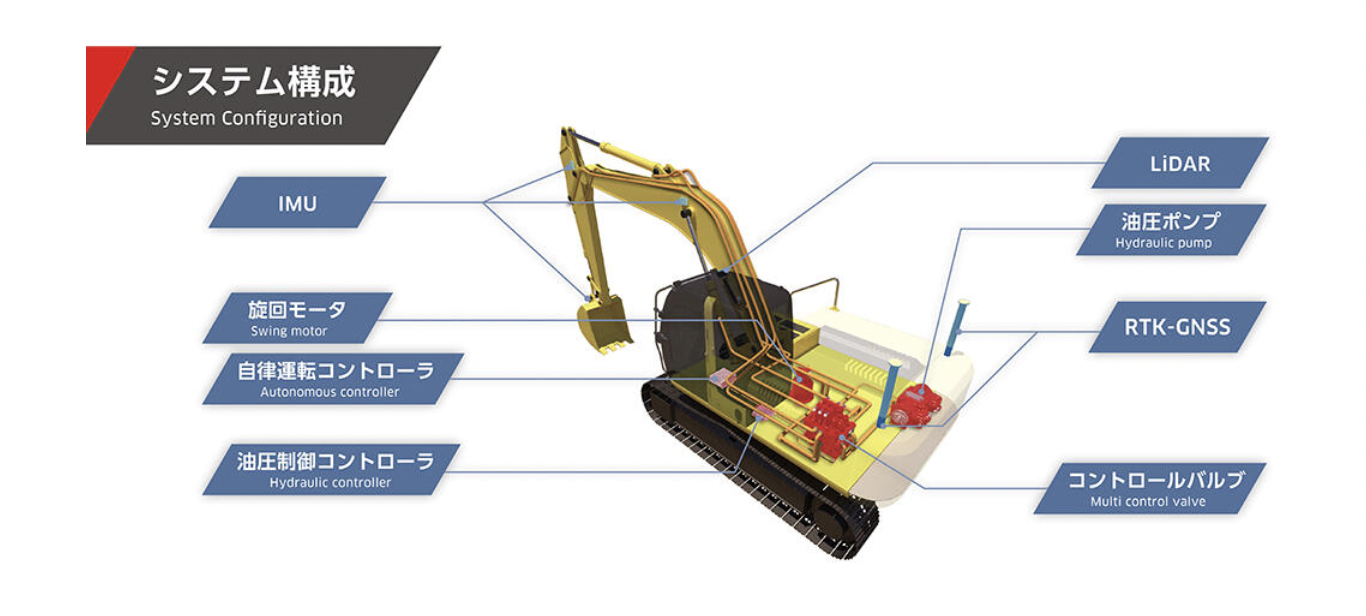
システムにはRTK-GNSS受信機2台を搭載し、ショベルの位置と方位をセンチメートル単位で計測する。
IMUセンサーをバケットに設置し、作業機の姿勢を正確に把握する。
産業用ロボットの制御技術と油圧制御技術を組み合わせ、高精度で滑らかな動作を実現した。
建設業界の人材不足と労働環境改善の課題に対応し、今後は様々な土質条件での安定施工を目指す。
3次元設計データとLiDARによる地形センシングを組み合わせ、掘削作業を自律制御する。
高精度センサーと油圧制御で自動掘削を実現
システムはショベルに搭載したコントローラーが掘削量を自動判断し、効率的な作業を計画する。
実証試験では幅2m、深さ0.6m、長さ10mの溝を自律施工できることを確認した。
掘削だけでなく溝床面の水平均しや押し固め作業も自動で実行可能である。
システムにはRTK-GNSS受信機2台を搭載し、ショベルの位置と方位をセンチメートル単位で計測する。
IMUセンサーをバケットに設置し、作業機の姿勢を正確に把握する。
産業用ロボットの制御技術と油圧制御技術を組み合わせ、高精度で滑らかな動作を実現した。
建設業界の人材不足と労働環境改善の課題に対応し、今後は様々な土質条件での安定施工を目指す。
参考・画像元:川崎重工業株式会社プレスリリースより
WRITTEN by



建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします