大林組と慶應義塾大学は、力触覚技術「リアルハプティクス」を応用し、トンネル掘削時の火薬装填作業を遠隔で実施できるシステムの実証実験に成功した。
システムは火薬供給装置を搭載した装填ロボットと、オペレータ室のリモコンで構成される。
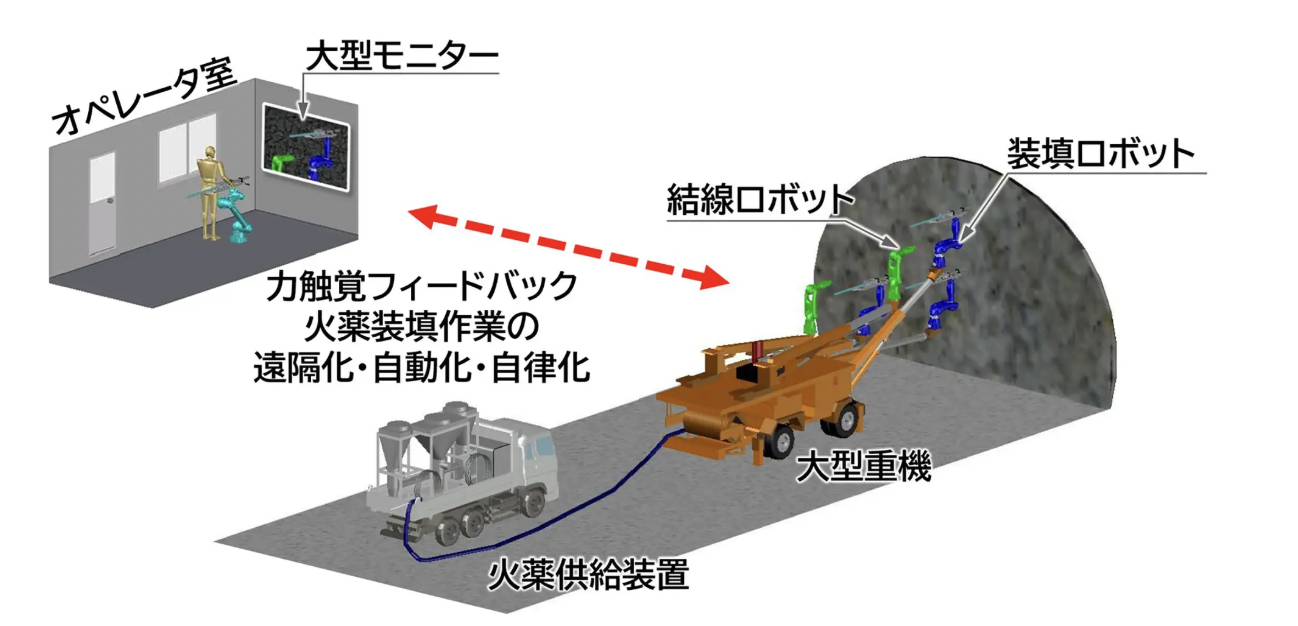
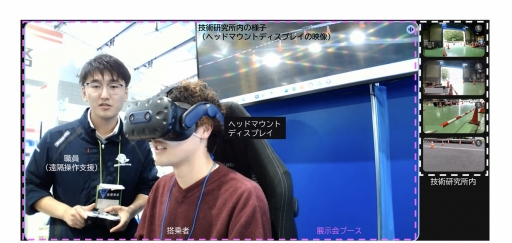
力触覚技術により、離れた場所からでも装填時の微細な感覚を再現し、安全かつ正確な作業が可能となる。
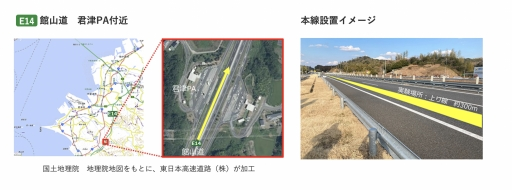
長野県のトンネル工事現場で実施された実証実験では、切羽から320m離れたトンネル外からの操作に成功した。

装填ロボットに搭載したステレオカメラが装薬孔の位置と角度を検知し、自動誘導を行う。
紙巻や粒状など様々な種類の火薬に対応し、供給から装填まで一連の作業を自動化できる。
今後は起爆用爆薬の供給装置の搭載や、大型重機との連携、脚線結線作業の自動化を進め、トンネル掘削作業の完全無人化を目指す。
切羽から320m離れた場所で安全な操作を実現
システムは火薬供給装置を搭載した装填ロボットと、オペレータ室のリモコンで構成される。
力触覚技術により、離れた場所からでも装填時の微細な感覚を再現し、安全かつ正確な作業が可能となる。
長野県のトンネル工事現場で実施された実証実験では、切羽から320m離れたトンネル外からの操作に成功した。
ステレオカメラで自動誘導。完全自律化も視野に
装填ロボットに搭載したステレオカメラが装薬孔の位置と角度を検知し、自動誘導を行う。
紙巻や粒状など様々な種類の火薬に対応し、供給から装填まで一連の作業を自動化できる。
今後は起爆用爆薬の供給装置の搭載や、大型重機との連携、脚線結線作業の自動化を進め、トンネル掘削作業の完全無人化を目指す。
参考・画像元:株式会社大林組プレスリリースより
WRITTEN by


建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします