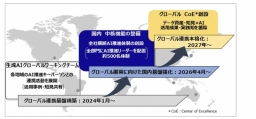

東日本旅客鉄道(JR東日本)は、Preferred Roboticsと共同開発中の線路内自律走行型ロボットについて、2026年10月末までに実用化向け機体を製作し、11月以降に在来線での走行試験を開始すると発表した。
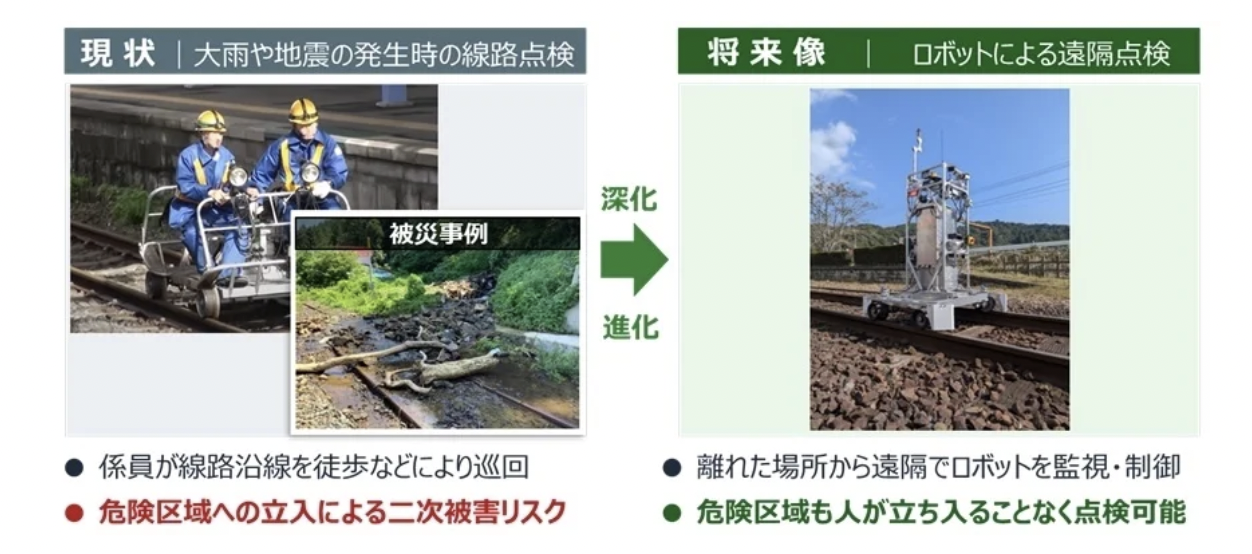
大雨・地震発生時の線路巡回点検における係員の危険区域立ち入りリスクと、熊などの野生動物との遭遇リスクの解消を主な目的としており、2024年4月の開発着手から八高線など計6線区での実証実験を経て実用化フェーズへ移行する。
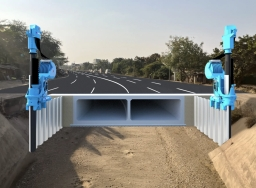
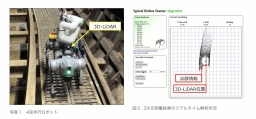
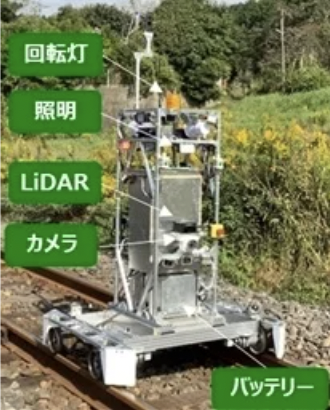
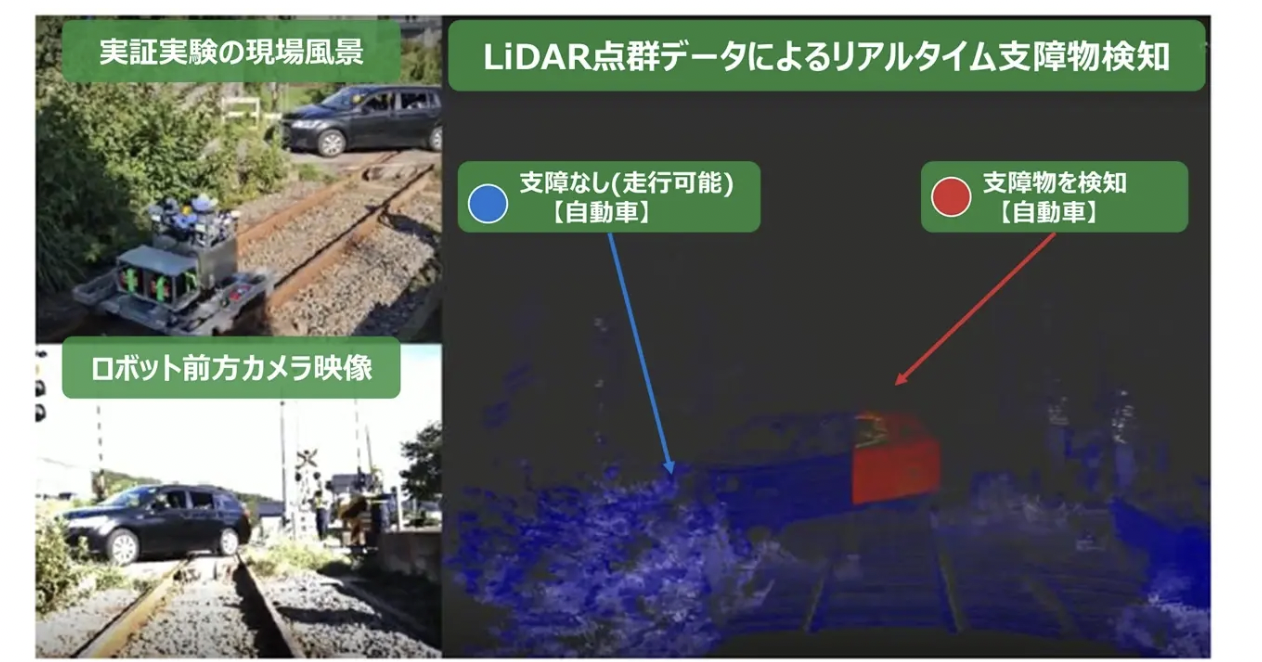
開発中のロボットはLiDAR・GNSS・カメラから得られる情報をもとに線路上を自律走行し、走行中に取得した映像と各種データをリアルタイムで事務所内の係員に送信する。
AIが線路周辺の支障物を自動検知して補助し、列車の運行への支障の有無の最終判断は係員が行う仕組みだ。
従来の徒歩巡回では係員の目視結果を紙や端末に手入力していたが、ロボット導入後はカメラ・センサーによる映像・データを一括取得・蓄積でき、設備管理への活用も可能になる。
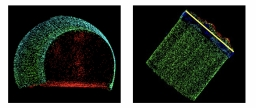
今後は大雨・地震時の点検でロボットを優先活用することで係員を危険区域から解放するとともに、走行ごとに蓄積される映像・3D点群データの設備管理への活用、ドローンの発着機能追加による線路周辺のより詳細な状況把握など、ロボティクスとAIを組み合わせた鉄道インフラ維持管理の高度化を目指す。
大雨・地震発生時の線路巡回点検における係員の危険区域立ち入りリスクと、熊などの野生動物との遭遇リスクの解消を主な目的としており、2024年4月の開発着手から八高線など計6線区での実証実験を経て実用化フェーズへ移行する。
LiDAR×GNSS×カメラで自律走行しAIが支障物を自動検知。映像は係員にリアルタイム送信
開発中のロボットはLiDAR・GNSS・カメラから得られる情報をもとに線路上を自律走行し、走行中に取得した映像と各種データをリアルタイムで事務所内の係員に送信する。
AIが線路周辺の支障物を自動検知して補助し、列車の運行への支障の有無の最終判断は係員が行う仕組みだ。
従来の徒歩巡回では係員の目視結果を紙や端末に手入力していたが、ロボット導入後はカメラ・センサーによる映像・データを一括取得・蓄積でき、設備管理への活用も可能になる。
将来はドローン発着機能の付加と3D点群データの設備管理活用も視野
今後は大雨・地震時の点検でロボットを優先活用することで係員を危険区域から解放するとともに、走行ごとに蓄積される映像・3D点群データの設備管理への活用、ドローンの発着機能追加による線路周辺のより詳細な状況把握など、ロボティクスとAIを組み合わせた鉄道インフラ維持管理の高度化を目指す。
WRITTEN by




建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします