戸田建設は7月24日、山岳トンネル発破作業の安全性向上を目的とした爆薬装填ホース自動挿入装置を開発したと発表した。
UP設計コンサルタント、HCI、虎乃門建設機械の協力のもと、切羽作業の無人化に寄与する装置として完成させた。
従来の爆薬装填作業では、作業員が崩落の危険性が高い切羽に立ち入り、手作業で爆薬を装薬孔に装填していた。
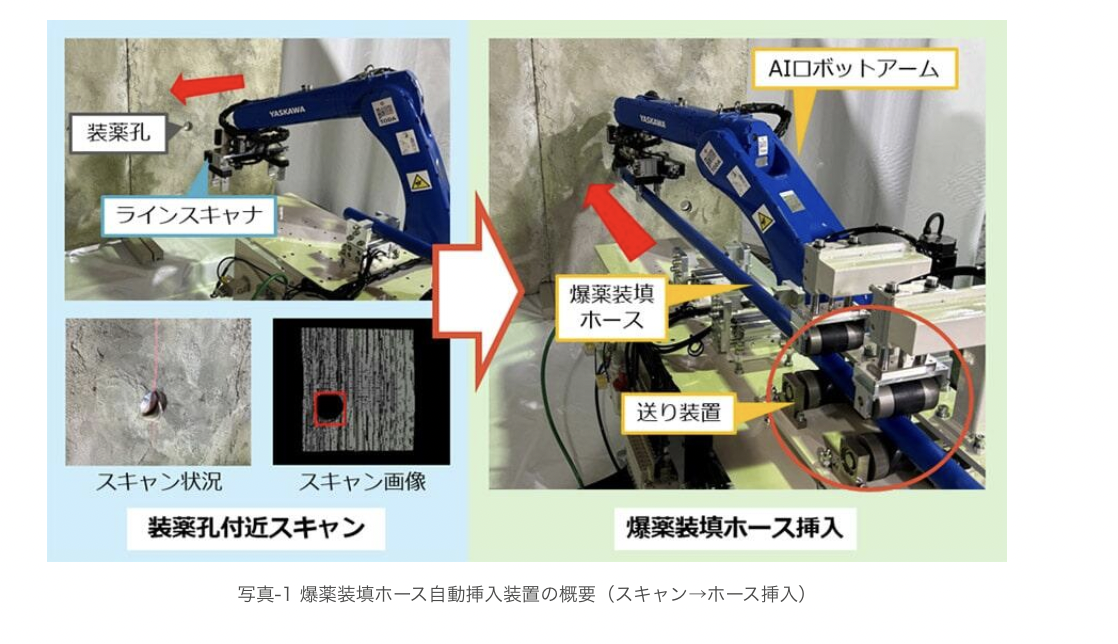
新開発の装置は、照度や色調の影響を受けないラインスキャナとAI画像処理技術により装薬孔の位置を正確に検出する仕組みを採用している。
AIロボットアームが爆薬装填ホースを自動で高精度に挿入した後、送り装置でホースを装薬孔の奥まで押し込む構造となっている。

この技術により爆薬の装填作業を遠隔化・自動化でき、安全性が大幅に向上することが可能となった。
ラインスキャナは対象物を線状にスキャンして距離情報を取得し、AIロボットアームで横方向に移動させながら縦方向に連続スキャンすることで平面的な距離情報を取得できる。
取得した距離情報から遠方を暗く表示して装薬孔内部を際立たせることで、照度や色調などの環境条件の影響を受けずに装薬孔の位置を可視化する。
AIロボットアームには、AI画像処理技術や力覚センサーと容易に連携可能なロボットコントローラーが搭載されている。
装薬孔付近の画像からAI画像処理技術により装薬孔の中心位置を検出し、その位置にアームが自動で爆薬装填ホースを運んで挿入する。
挿入時にはアーム先端の力覚センサーがホースと孔壁の接触を感知し、自動的に位置を微調整する機能も備えている。
検証実験はHCIの板原第2工場で実施され、模擬岩盤を対象に装薬孔の検出から爆薬装填ホースの挿入・押し込みまでの一連の工程を自動で実施できることを確認した。
今後は装置の精度および速度を向上させ、現場への適用を進めていき、さらには、現場製造バルクエマルジョン爆薬や無線発破システムとの連携により発破作業の完全自動化を目指す
UP設計コンサルタント、HCI、虎乃門建設機械の協力のもと、切羽作業の無人化に寄与する装置として完成させた。
ラインスキャナとAI画像処理技術で装薬孔位置を正確検出
従来の爆薬装填作業では、作業員が崩落の危険性が高い切羽に立ち入り、手作業で爆薬を装薬孔に装填していた。
新開発の装置は、照度や色調の影響を受けないラインスキャナとAI画像処理技術により装薬孔の位置を正確に検出する仕組みを採用している。
AIロボットアームが爆薬装填ホースを自動で高精度に挿入した後、送り装置でホースを装薬孔の奥まで押し込む構造となっている。
(画像:検証実験の様子)
この技術により爆薬の装填作業を遠隔化・自動化でき、安全性が大幅に向上することが可能となった。
ラインスキャナは対象物を線状にスキャンして距離情報を取得し、AIロボットアームで横方向に移動させながら縦方向に連続スキャンすることで平面的な距離情報を取得できる。
取得した距離情報から遠方を暗く表示して装薬孔内部を際立たせることで、照度や色調などの環境条件の影響を受けずに装薬孔の位置を可視化する。
AIロボットアームには、AI画像処理技術や力覚センサーと容易に連携可能なロボットコントローラーが搭載されている。
装薬孔付近の画像からAI画像処理技術により装薬孔の中心位置を検出し、その位置にアームが自動で爆薬装填ホースを運んで挿入する。
挿入時にはアーム先端の力覚センサーがホースと孔壁の接触を感知し、自動的に位置を微調整する機能も備えている。
検証実験はHCIの板原第2工場で実施され、模擬岩盤を対象に装薬孔の検出から爆薬装填ホースの挿入・押し込みまでの一連の工程を自動で実施できることを確認した。
今後は装置の精度および速度を向上させ、現場への適用を進めていき、さらには、現場製造バルクエマルジョン爆薬や無線発破システムとの連携により発破作業の完全自動化を目指す
WRITTEN by


建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします