ニュース
大林組がクレーン作業の安全性と生産性向上を支援する統合管理・制御システム構築。東日本ロボティクスセンターに720tm級・360tm級タワークレーン2基の実証フィールド開設
大林組は、「危険作業を未然に防止するクレーン」の実現を目指し、操縦時の安全支援機能や遠隔・自動運転機能、さらに施工計画や運転シミュレーション機能などデジタルツイン技術を活用して統合的に管理制御するシステム「ORCISM(Obayashi Robotics Crane Integrated SysteM:オーシズム)」を構築した。
今般、ORCISMを構築した実証フィールドを大林組の東日本ロボティクスセンター(埼玉県川越市)内に開設し、クレーン作業の安全性向上、省人化、技能補完や生産性向上につながる技術開発やシステム検証を順次推進していく方針である。
ORCISMは、クレーン作業で求められる3つの機能で構成され、安全性を確保するための作業支援機能「クレーンマシンガイダンス」、遠隔・自動運転による省人化や技能補完する機能「クレーンマシンコントロール」、生産性向上とセキュリティの確保を実現する機能「クレーンマシンマネジメント」がある。
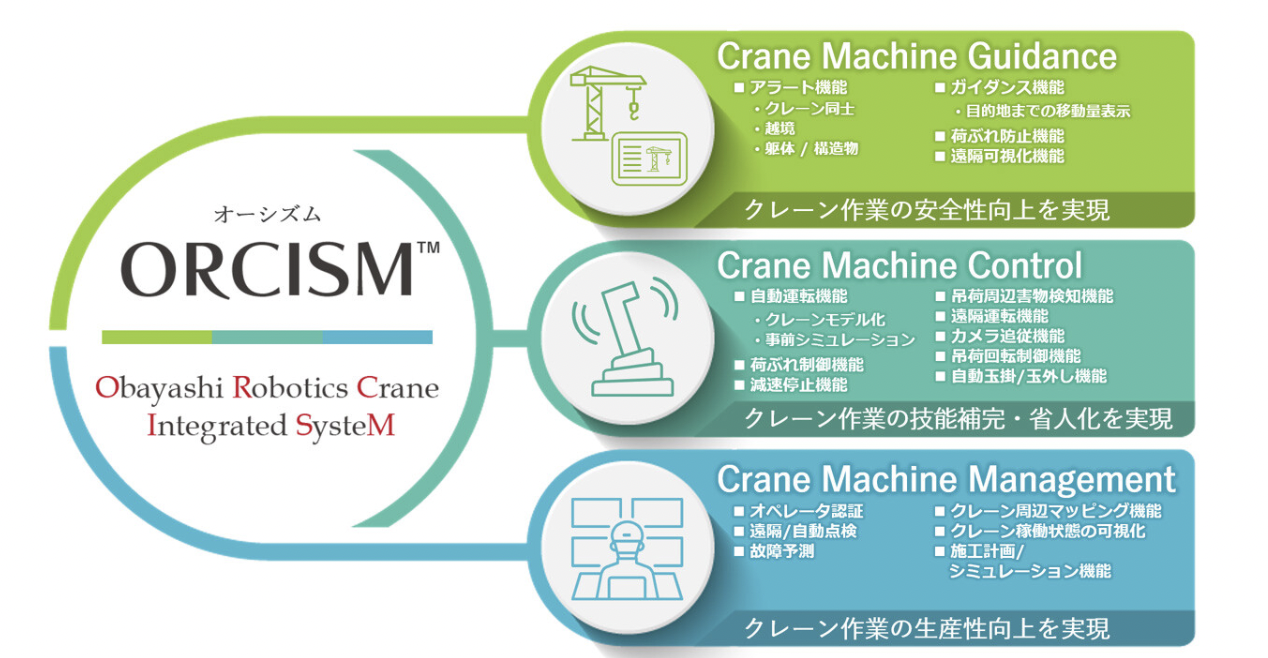
これらの3つの機能はデジタルツイン上で統合し、管理制御することで、デジタルツイン上でクレーンとクレーン周辺の障害物の接近を検知し、フィジカル空間でアラートを発することができる。
デジタルツイン上で、吊り荷の揺れを常時監視し、状況に応じてフィジカル空間でクレーンを減速停止させることが可能な仕組みとなっている。
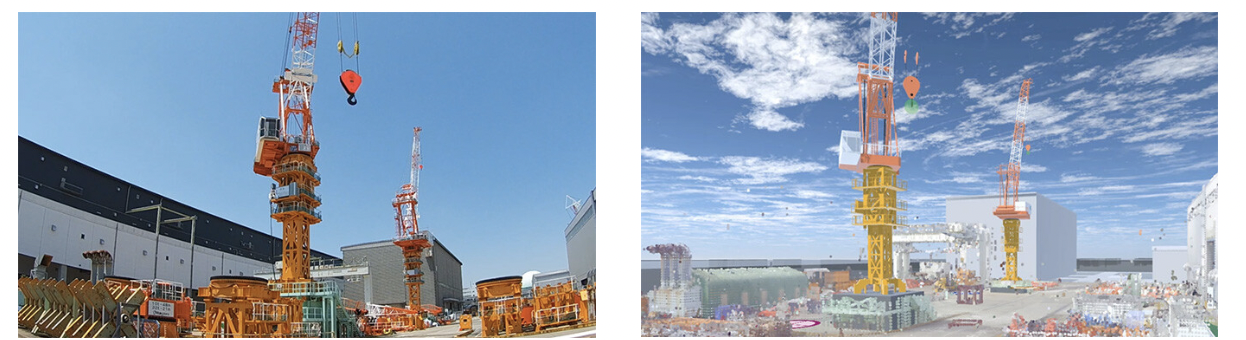 〈東日本ロボティクスセンターに設置した実証フィールドのタワークレーン(左)とデジタルツイン(右)〉
〈東日本ロボティクスセンターに設置した実証フィールドのタワークレーン(左)とデジタルツイン(右)〉
デジタルツインを活用して安全で効率的なクレーン操作を支援するマシンガイダンスシステムや、吊り荷の姿勢制御装置「スカイジャスター」、無資格者による建設機械の運転を防止する「フェイスターター」など、クレーン作業における災害を防止するための各技術をORCISMに連携することができる統合システムとなっている。
東日本ロボティクスセンター内にある実証フィールドは、大型建造物を建設する際に使われる720tm(トンメートル)級と、360tm級のタワークレーン2基に、遠隔・自動・自律運転できる遠隔操作室を設置している。
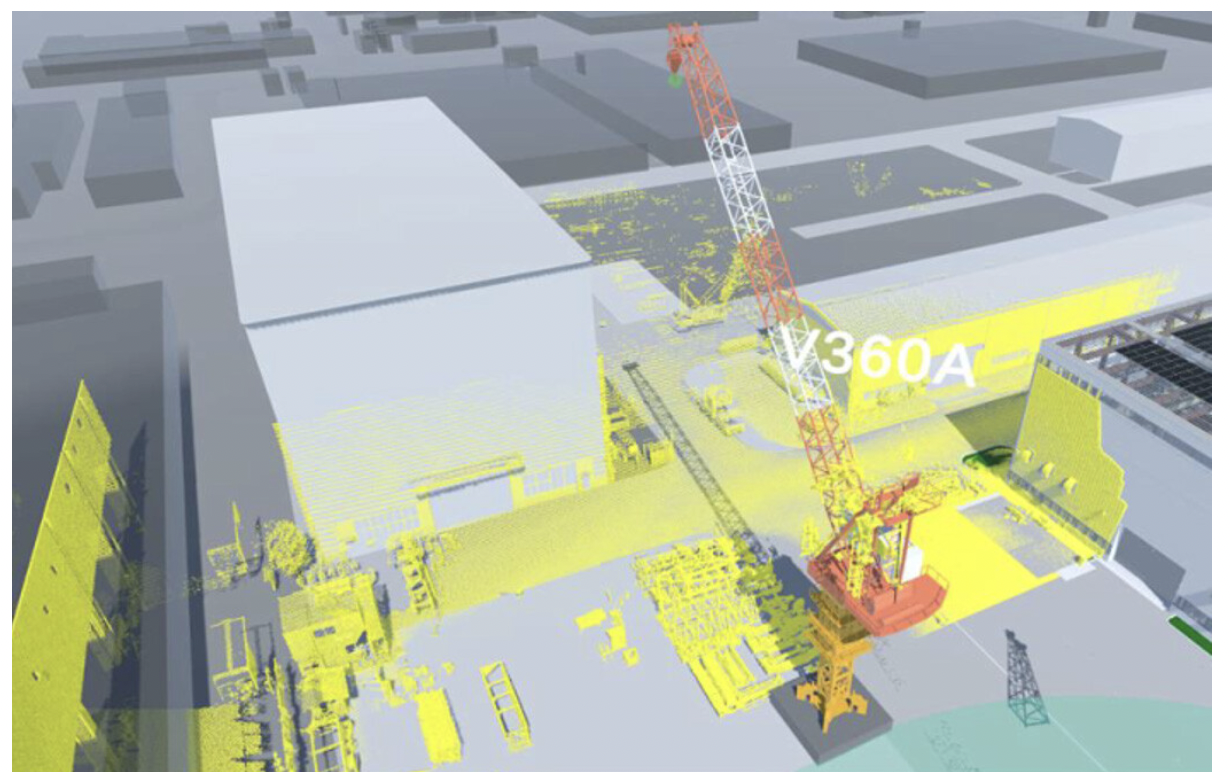 (周辺マッピングによりリアルタイムでデジタルツイン化)
(周辺マッピングによりリアルタイムでデジタルツイン化)
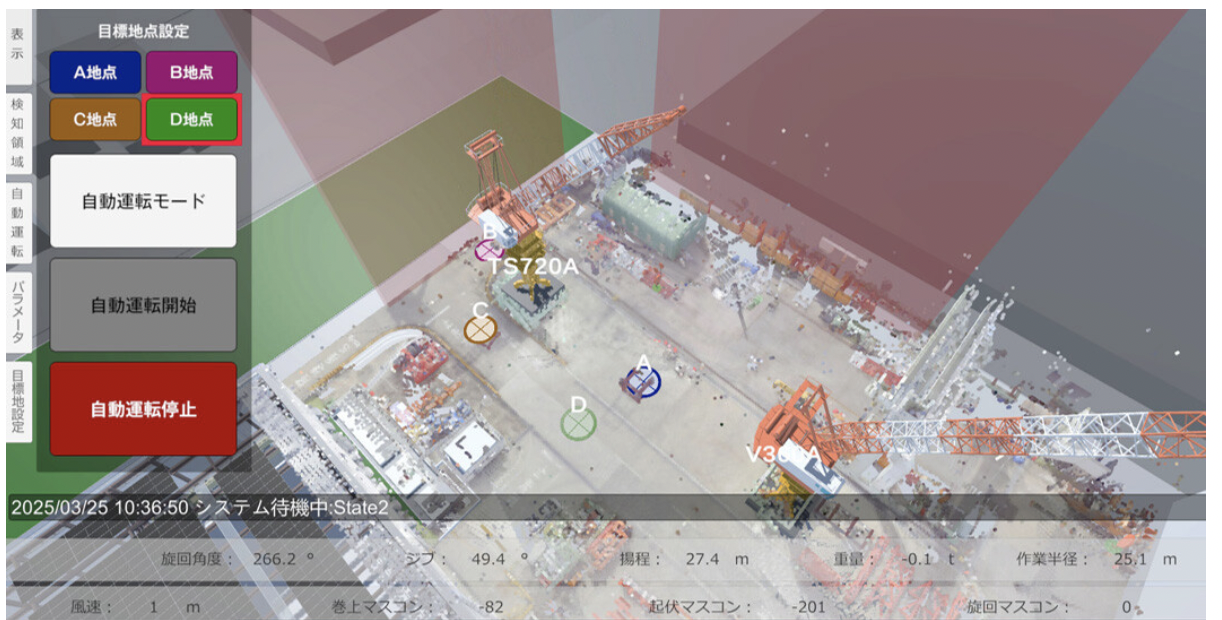
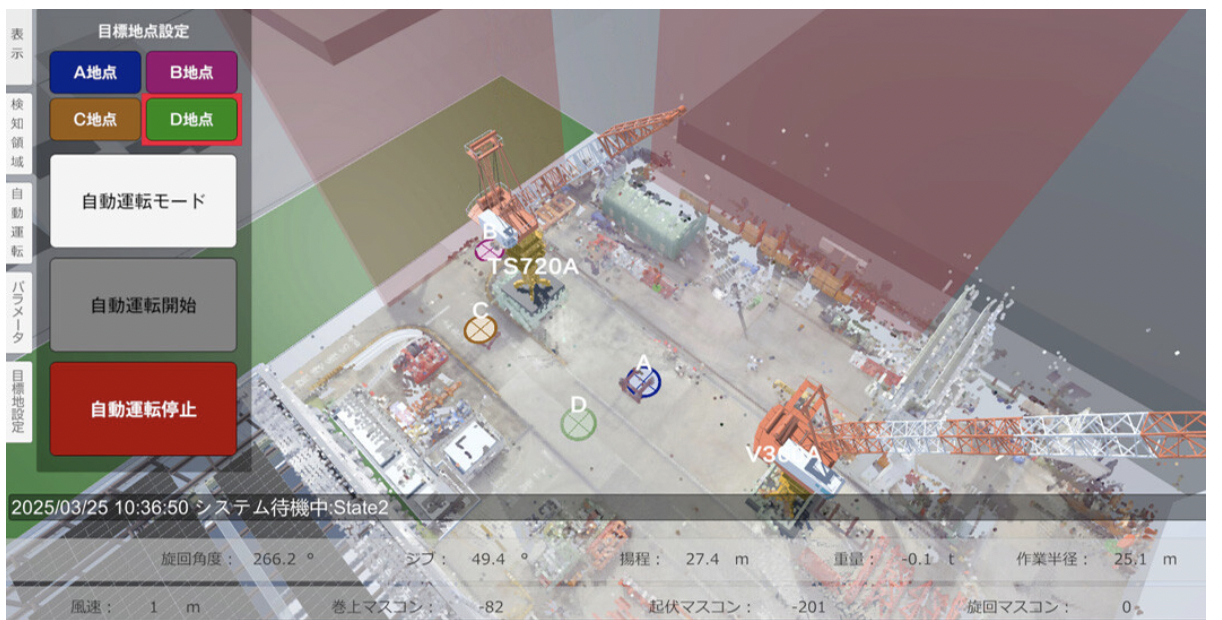 (遠隔操作室でのデジタルツインを用いた自動運転の指示状況)
(遠隔操作室でのデジタルツインを用いた自動運転の指示状況)
タワークレーンを含めた周辺環境をデジタルツイン上で再現している設備構成となっている。
これらの環境は、タワークレーン周辺をリアルタイムにサイバー空間で可視化するだけでなく、サイバー空間で行った指示や判定をリアルタイムにフィジカル空間に反映する機能を備えている。
この実証フィールドでは、クレーン作業に関する安全性向上、省人化、技能補完や生産性向上といったさまざまな目的の技術開発を行う計画となっている。
周辺マッピングによりリアルタイムでデジタルツイン化を実現し、遠隔操作室でのデジタルツインを用いた自動運転の指示が可能な環境を構築している。
大林組は、実証フィールドでORCISMの開発を順次推し進め、「危険作業を未然に防止するクレーン」を実現することで、安全・安心な建設工事に貢献していく方針である。
今般、ORCISMを構築した実証フィールドを大林組の東日本ロボティクスセンター(埼玉県川越市)内に開設し、クレーン作業の安全性向上、省人化、技能補完や生産性向上につながる技術開発やシステム検証を順次推進していく方針である。
3つの機能をデジタルツイン上で統合管理。クレーンマシンガイダンス・コントロール・マネジメントで障害物接近検知とリアルタイム減速停止を実現
ORCISMは、クレーン作業で求められる3つの機能で構成され、安全性を確保するための作業支援機能「クレーンマシンガイダンス」、遠隔・自動運転による省人化や技能補完する機能「クレーンマシンコントロール」、生産性向上とセキュリティの確保を実現する機能「クレーンマシンマネジメント」がある。
これらの3つの機能はデジタルツイン上で統合し、管理制御することで、デジタルツイン上でクレーンとクレーン周辺の障害物の接近を検知し、フィジカル空間でアラートを発することができる。
デジタルツイン上で、吊り荷の揺れを常時監視し、状況に応じてフィジカル空間でクレーンを減速停止させることが可能な仕組みとなっている。
〈東日本ロボティクスセンターに設置した実証フィールドのタワークレーン(左)とデジタルツイン(右)〉デジタルツインを活用して安全で効率的なクレーン操作を支援するマシンガイダンスシステムや、吊り荷の姿勢制御装置「スカイジャスター」、無資格者による建設機械の運転を防止する「フェイスターター」など、クレーン作業における災害を防止するための各技術をORCISMに連携することができる統合システムとなっている。
東日本ロボティクスセンター内にある実証フィールドは、大型建造物を建設する際に使われる720tm(トンメートル)級と、360tm級のタワークレーン2基に、遠隔・自動・自律運転できる遠隔操作室を設置している。
(周辺マッピングによりリアルタイムでデジタルツイン化)(遠隔操作室でのデジタルツインを用いた自動運転の指示状況)タワークレーンを含めた周辺環境をデジタルツイン上で再現している設備構成となっている。
これらの環境は、タワークレーン周辺をリアルタイムにサイバー空間で可視化するだけでなく、サイバー空間で行った指示や判定をリアルタイムにフィジカル空間に反映する機能を備えている。
この実証フィールドでは、クレーン作業に関する安全性向上、省人化、技能補完や生産性向上といったさまざまな目的の技術開発を行う計画となっている。
周辺マッピングによりリアルタイムでデジタルツイン化を実現し、遠隔操作室でのデジタルツインを用いた自動運転の指示が可能な環境を構築している。
大林組は、実証フィールドでORCISMの開発を順次推し進め、「危険作業を未然に防止するクレーン」を実現することで、安全・安心な建設工事に貢献していく方針である。
WRITTEN by


建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします