ニュース
コベルコ建機、「遠隔操作における現場見える化の開発」に向けて、ロボティクス×AIのスタートアップと協業発表
ロボティクス×AIで社会課題の解決を目指す株式会社センシンロボティクス(東京都/以下、センシンロボティクス)とコベルコ建機株式会社(東京都/以下、コベルコ建機)は、コベルコ建機の目指す「働く人を中心とした建設現場のテレワークシステム」K-DIVE CONCEPT※1(以下、K-DIVE)推進のために、「遠隔操作における現場見える化の開発」に向けて協業することを発表した。
コベルコ建機は、「誰でも働ける現場へ KOBELCO IoT」をテーマにICTロードマップを策定し、その実現に向けて中長期的な研究・開発を推進中。
現在開発を進めている遠隔操作システム(K-DIVE)はそのひとつの柱であり、クラウドマッチングシステムと建設機械の遠隔操作を融合させることで、特定の人・場所・時間などの制約を受けずに建設現場での施工が可能となる「建設現場のテレワーク化」を目指している。
この実現により、深刻化する建設技能者の不足に対する多様な人材活用、現場生産性の向上、現場無人化による本質的な安全確保、などが可能になると見据える。
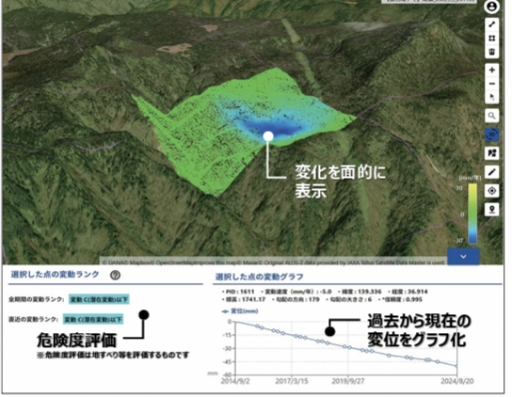
今回の協業では、センシンロボティクスの得意とするドローンやLiDAR※2を活用した各種データの収集、3D点群マップをもとにした測量結果や水流シミュレーションの3D図面への反映による情報可視化と、それらのコックピットへのリアルタイム伝送、などのシステム構築と実装に向けた開発を共同で進める。(なお、センシンロボティクスは3D点群データの自動フィルタリング、高度解析、データ共有に関するシステム構築をスキャン・エックス株式会社※3と共同で進行中)。
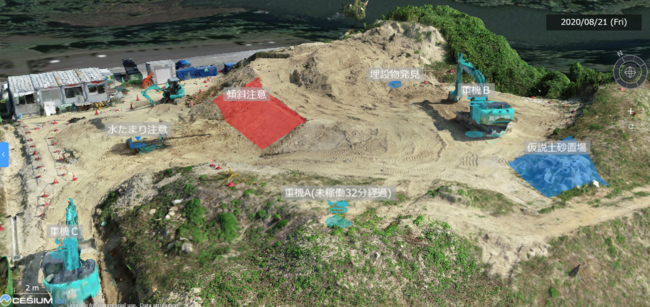
開発中の現場情報可視化イメージ (現場の状況を確認しながら円滑なコミュニケーションの実現を目指す)
これらがK-DIVEに実装されることで、稼働現場の様々な情報(例えば、機械周辺の状況や埋設物の有無、土の形状や体積など)を可視化し、オペレータが効率的かつ安全・安心して働ける遠隔施工現場が実現するとともに、現場状況の確認や作業指示などに利用することで、現場関係者のコミュニケーションが飛躍的に高まると、両社は期待を寄せる。
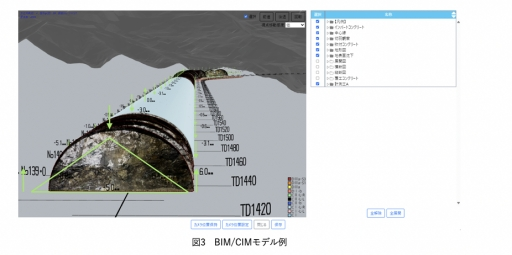
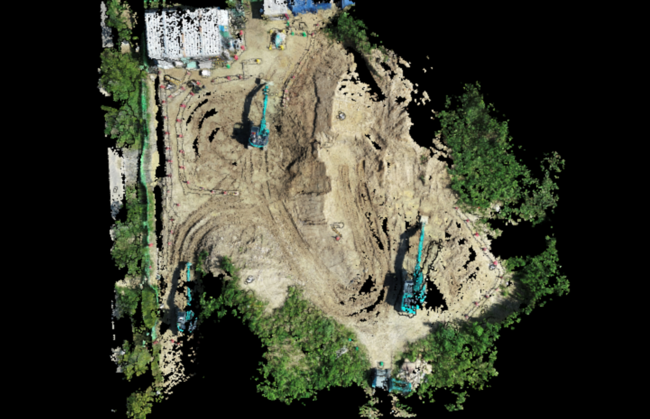 スキャン・エックスクラウドを利用した作業現場全体の3D点群マップ化イメージ
スキャン・エックスクラウドを利用した作業現場全体の3D点群マップ化イメージ
※1 “K-DIVE CONCEPT”とは、コベルコ建機が研究・開発を進める、次世代遠隔操縦技術を用いた「働く人を中心とした、建設現場のテレワークシステム」のことで、建設現場で働く人の働き方を大きく変え、豊かな生活、社会を実現することを目的としている。
※2 LiDARとは「Light Detection and Ranging」の略称で、レーザー光により対象物までの距離や性質を計測・特定などをおこなう光センサー技術。
※3 2019年に設立したスタートアップ企業で、各種機器で取得した3D点群データをオンラインで高精度なクラス分類・解析が出来るソフト「スキャン・エックスクラウド」を提供。
プレスリリースより
コベルコ建機は、「誰でも働ける現場へ KOBELCO IoT」をテーマにICTロードマップを策定し、その実現に向けて中長期的な研究・開発を推進中。
現在開発を進めている遠隔操作システム(K-DIVE)はそのひとつの柱であり、クラウドマッチングシステムと建設機械の遠隔操作を融合させることで、特定の人・場所・時間などの制約を受けずに建設現場での施工が可能となる「建設現場のテレワーク化」を目指している。
この実現により、深刻化する建設技能者の不足に対する多様な人材活用、現場生産性の向上、現場無人化による本質的な安全確保、などが可能になると見据える。
今回の協業では、センシンロボティクスの得意とするドローンやLiDAR※2を活用した各種データの収集、3D点群マップをもとにした測量結果や水流シミュレーションの3D図面への反映による情報可視化と、それらのコックピットへのリアルタイム伝送、などのシステム構築と実装に向けた開発を共同で進める。(なお、センシンロボティクスは3D点群データの自動フィルタリング、高度解析、データ共有に関するシステム構築をスキャン・エックス株式会社※3と共同で進行中)。
開発中の現場情報可視化イメージ (現場の状況を確認しながら円滑なコミュニケーションの実現を目指す)これらがK-DIVEに実装されることで、稼働現場の様々な情報(例えば、機械周辺の状況や埋設物の有無、土の形状や体積など)を可視化し、オペレータが効率的かつ安全・安心して働ける遠隔施工現場が実現するとともに、現場状況の確認や作業指示などに利用することで、現場関係者のコミュニケーションが飛躍的に高まると、両社は期待を寄せる。
スキャン・エックスクラウドを利用した作業現場全体の3D点群マップ化イメージ※1 “K-DIVE CONCEPT”とは、コベルコ建機が研究・開発を進める、次世代遠隔操縦技術を用いた「働く人を中心とした、建設現場のテレワークシステム」のことで、建設現場で働く人の働き方を大きく変え、豊かな生活、社会を実現することを目的としている。
※2 LiDARとは「Light Detection and Ranging」の略称で、レーザー光により対象物までの距離や性質を計測・特定などをおこなう光センサー技術。
※3 2019年に設立したスタートアップ企業で、各種機器で取得した3D点群データをオンラインで高精度なクラス分類・解析が出来るソフト「スキャン・エックスクラウド」を提供。
プレスリリースより
WRITTEN by

建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします