竹中工務店とセンシンロボティクスは共同で、国土交通省主導の「Project PLATEAU」の一環として、都市部におけるドローン自律飛行技術の確立を目指し、実証実験を実施した。
Project PLATEAUとは国土交通省が推進する3D都市モデルの整備・活用・オープンデータ化プロジェクト。誰もが自由に都市のデータを引き出し、活用できるようになることを目指している。
関西万博会場の建設が進む夢洲地区において、ドローンの自律飛行で資材運搬を行う実証実験などに参画予定だ。
通常、ドローンの自律飛行は GPS を用いて位置を特定することで行われるが、GPSの受信状況が悪い高層ビルの谷間などでは、飛行安定性が確保できないという課題があった。
そこでセンシンロボティクスと竹中工務店は、従来の GPS に加え、建物との距離を計測するLiDARと移動量を算出するVIO(Visual Inertial Odometry/連続的に取得されたカメラ画像の変化を捉えることでドローンの移動量を算出する技術)の2つの機能をドローンに搭載し、自己位置推定の冗長化を達成した。
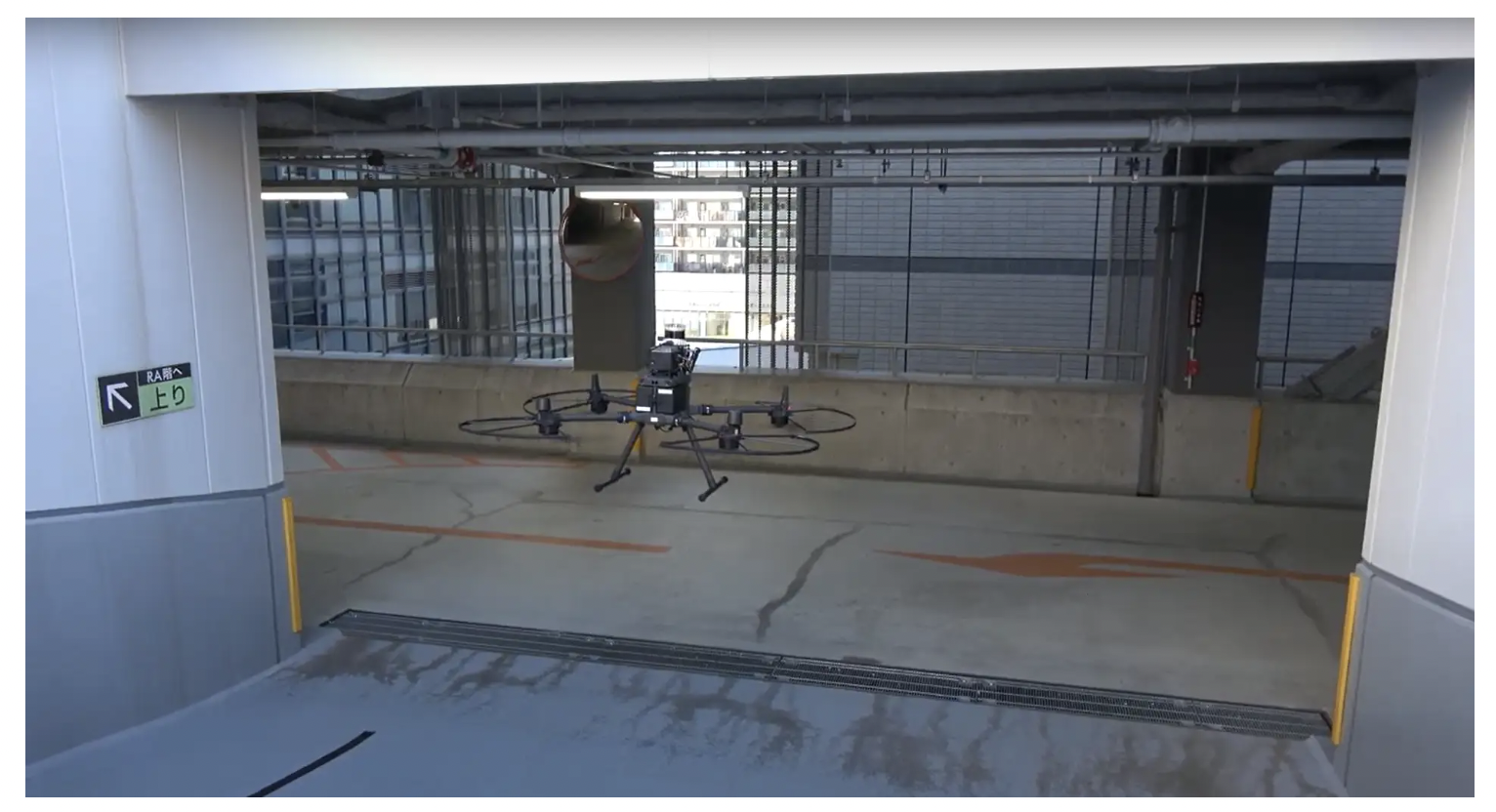 (ドローン自律飛行での建物屋内へ着陸する様子)
(ドローン自律飛行での建物屋内へ着陸する様子)
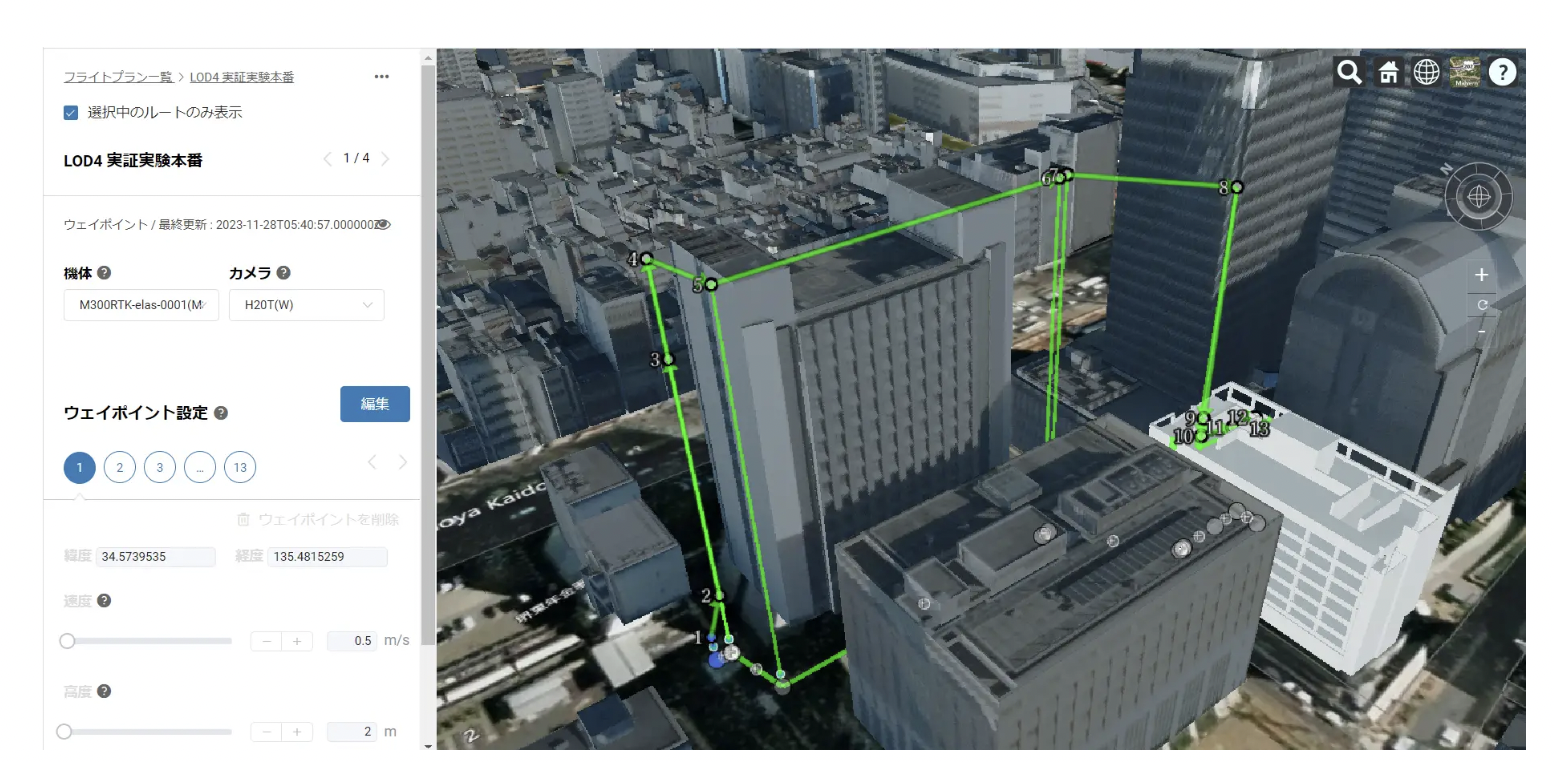
ドローンは高層ビルの谷間など GPS の受信状況が悪い場所を飛行する場合、3D都市モデルおよびBIMから作成した点群マップを活用して飛行し、同じ形状の窓が並ぶ高層ビルの周辺など、LiDARによる測位精度が低下する場所では VIO の画像判断により測位精度を確保する。
実証実験は、大阪府堺市の高層ビルが立ち並ぶエリアにて、建物に沿って高高度の飛行を行い、建物の屋内に着陸するルートを設定し、本開発システムを用いたドローン自律飛行を実施。
実験の結果、高層ビルの谷間においても正確かつ安全に建物屋内外を自律飛行で往来できることを確認した。
Project PLATEAUとは国土交通省が推進する3D都市モデルの整備・活用・オープンデータ化プロジェクト。誰もが自由に都市のデータを引き出し、活用できるようになることを目指している。
関西万博会場の建設が進む夢洲地区において、ドローンの自律飛行で資材運搬を行う実証実験などに参画予定だ。
都市部高層ビルの谷間におけるドローン自律飛行
通常、ドローンの自律飛行は GPS を用いて位置を特定することで行われるが、GPSの受信状況が悪い高層ビルの谷間などでは、飛行安定性が確保できないという課題があった。
そこでセンシンロボティクスと竹中工務店は、従来の GPS に加え、建物との距離を計測するLiDARと移動量を算出するVIO(Visual Inertial Odometry/連続的に取得されたカメラ画像の変化を捉えることでドローンの移動量を算出する技術)の2つの機能をドローンに搭載し、自己位置推定の冗長化を達成した。
(ドローン自律飛行での建物屋内へ着陸する様子)ドローンは高層ビルの谷間など GPS の受信状況が悪い場所を飛行する場合、3D都市モデルおよびBIMから作成した点群マップを活用して飛行し、同じ形状の窓が並ぶ高層ビルの周辺など、LiDARによる測位精度が低下する場所では VIO の画像判断により測位精度を確保する。
実証実験は、大阪府堺市の高層ビルが立ち並ぶエリアにて、建物に沿って高高度の飛行を行い、建物の屋内に着陸するルートを設定し、本開発システムを用いたドローン自律飛行を実施。
実験の結果、高層ビルの谷間においても正確かつ安全に建物屋内外を自律飛行で往来できることを確認した。
参考・画像元:センシンロボティクスプレスリリース
WRITTEN by



建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします