戸田建設とSpiralは2023年12月19日、2023年10月末に共同開発した「非SLAM型自律飛行ドローン」の飛行検証を茨城県つくば市にある実大トンネルで実施した。

両社は、山岳トンネルなどの非GNSS環境下で情報取得を自動化するため、これまでに自律飛行ドローンを用いて3回の実証実験を行っている。
ドローンが撮影する画像などのデータ取得や坑内に設置した設備の位置情報把握など、実現場への導入に向けた準備を進めてきた。
しかし、重機類をはじめ、坑内設備の位置が日々変化する動的環境に対応するには、障害物検知センサーが不可欠だった。
そのため、トンネル内でドローンによるデータ取得の自動化を目的に、障害物検知センサーを搭載した機体を共同開発するに至った。
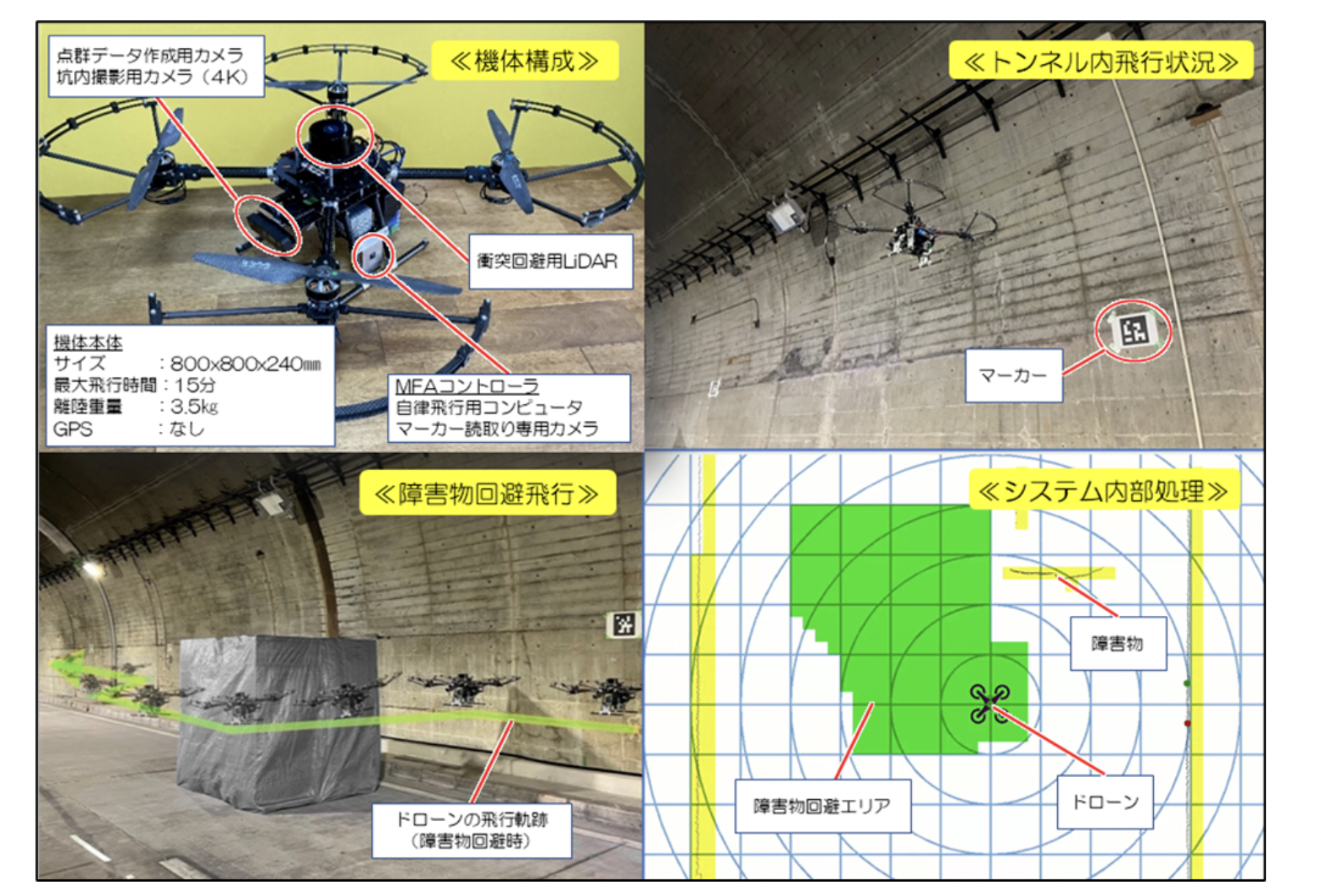
障害物検知センサーは、自動で障害物を検知して回避しながら、定められた飛行経路を維持する。SLAM技術も必要としないため、照度不足で特徴点も少なく、山岳トンネルのような屋内暗所かつ障害物の多い場所でも、高速かつ長距離の自律飛行が実現する。
RTK-GNSS(全地球航法衛星システム)が届かず、重機などが輻輳(ふくそう)環境でも、自動で障害物を検知し、安全なルートを選択しながら飛行することを証明した。
両社は、山岳トンネルなどの非GNSS環境下で情報取得を自動化するため、これまでに自律飛行ドローンを用いて3回の実証実験を行っている。
ドローンが撮影する画像などのデータ取得や坑内に設置した設備の位置情報把握など、実現場への導入に向けた準備を進めてきた。
しかし、重機類をはじめ、坑内設備の位置が日々変化する動的環境に対応するには、障害物検知センサーが不可欠だった。
そのため、トンネル内でドローンによるデータ取得の自動化を目的に、障害物検知センサーを搭載した機体を共同開発するに至った。
障害物検知センサーは、自動で障害物を検知して回避しながら、定められた飛行経路を維持する。SLAM技術も必要としないため、照度不足で特徴点も少なく、山岳トンネルのような屋内暗所かつ障害物の多い場所でも、高速かつ長距離の自律飛行が実現する。
RTK-GNSS(全地球航法衛星システム)が届かず、重機などが輻輳(ふくそう)環境でも、自動で障害物を検知し、安全なルートを選択しながら飛行することを証明した。
参考・画像元:戸田建設プレスリリース
WRITTEN by



建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします