熊谷組、京セラ、NECは、ローカル5Gを利用した建設機械2台の自動走行と、4Kカメラ映像伝送の実証実験を昨年末に実施した。実証実験は熊谷組技術研究所屋外実験ヤードにて行われた。
実証実験では、技術研究所内の建物にNEC製ローカル5G基地局を設置し、アンテナを屋外実験ヤードに向けた。
遠隔操作および自動走行が可能な建機上には、受信電力情報をリアルタイムで取得できる、京セラ製ローカル5G対応デバイス「K5G-C-100A」を設置。
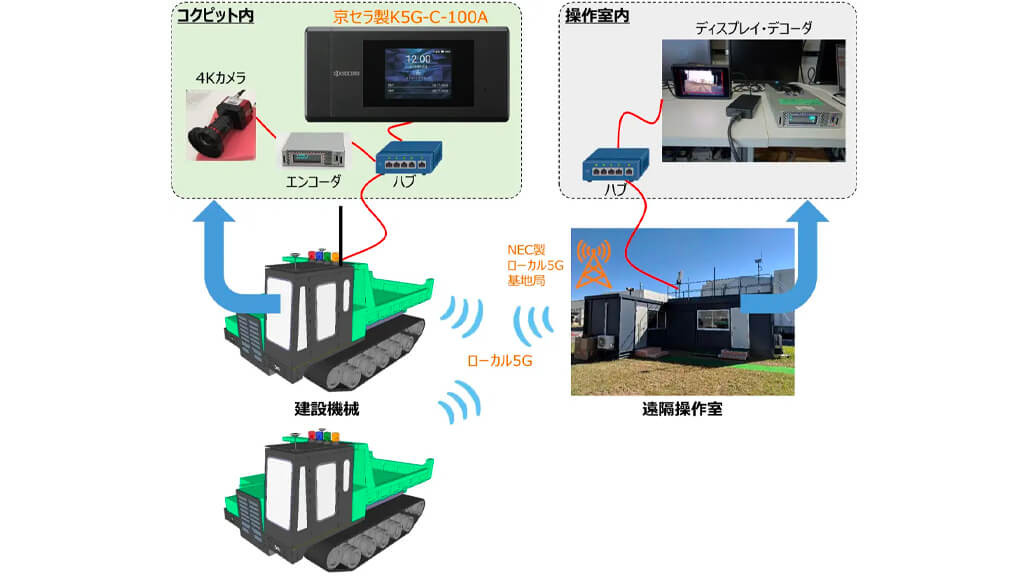
これにより、車載4Kカメラの映像をIP(インターネットプロトコル)ネットワークの上り回線を通じて、高速パケット伝送を行い、遠隔操作室内に設置されたディスプレイに、デコーダ出力を80msecで表示することが可能となる。実証実験の結果、移動する建機の位置を遠隔操作室内のディスプレイによって確認された。

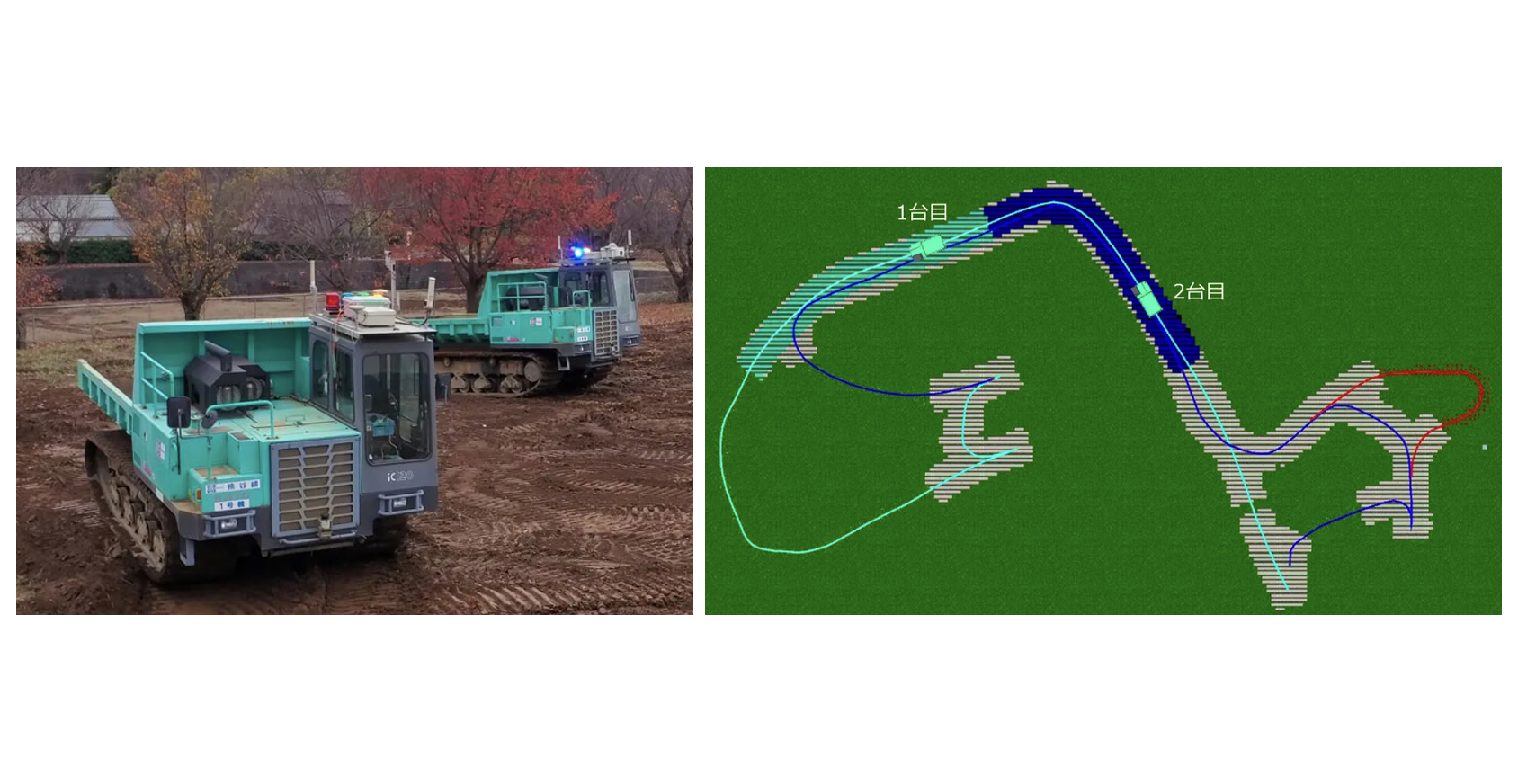
加えて、「K5G-C-100A」で取得された受信信号とGPS情報を使い、屋外実験ヤード内を移動した時の受信電力特性が確認された。
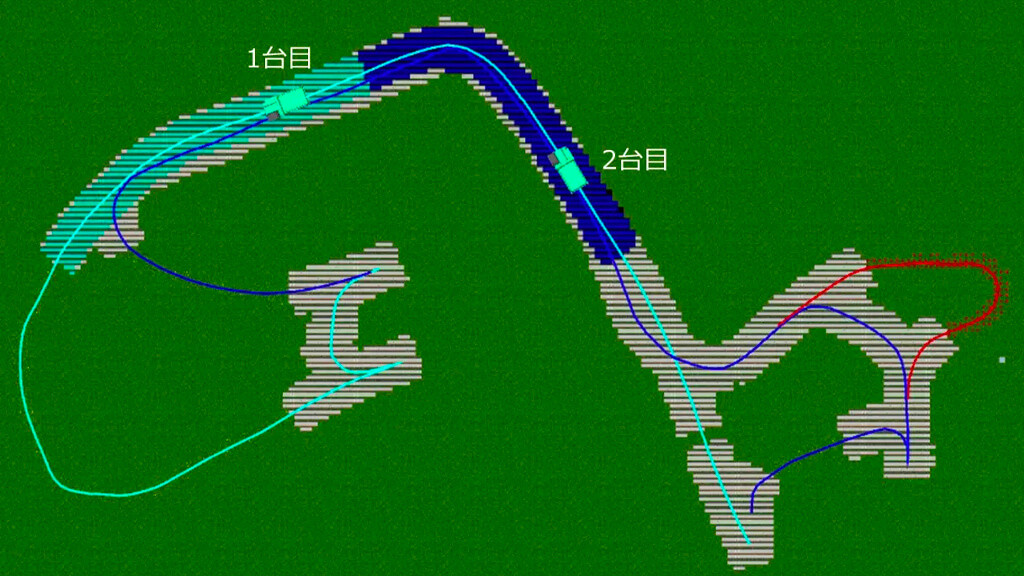
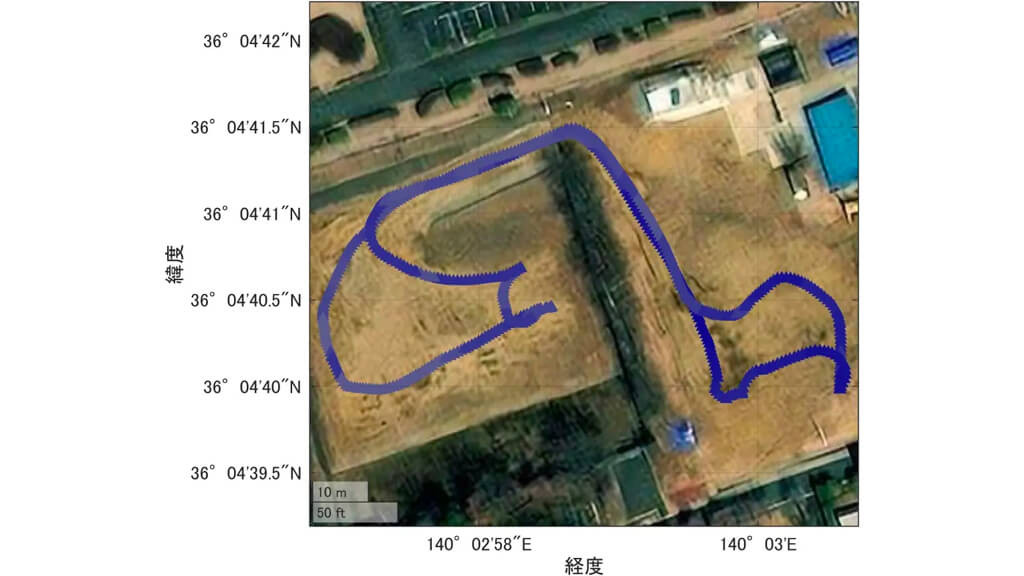
上図の濃い青色ほど受信電力が高く、ヤード内では4Kカメラ映像を安定的に伝送できる電力値であることが明らかとなり、これらの位置情報と受信電力特性の情報を活用することで、屋外実験ヤード内の建設機械2台が、往路と復路のルートに対して安全間隔を保ちながら自動走行することが可能となった。
今後は、実際の建設現場における技術検証など、4Kカメラが搭載された建機の自動走行の高度化・実用化に向けて、様々な実証実験を行っていく。
実証実験では、技術研究所内の建物にNEC製ローカル5G基地局を設置し、アンテナを屋外実験ヤードに向けた。
遠隔操作および自動走行が可能な建機上には、受信電力情報をリアルタイムで取得できる、京セラ製ローカル5G対応デバイス「K5G-C-100A」を設置。
これにより、車載4Kカメラの映像をIP(インターネットプロトコル)ネットワークの上り回線を通じて、高速パケット伝送を行い、遠隔操作室内に設置されたディスプレイに、デコーダ出力を80msecで表示することが可能となる。実証実験の結果、移動する建機の位置を遠隔操作室内のディスプレイによって確認された。
加えて、「K5G-C-100A」で取得された受信信号とGPS情報を使い、屋外実験ヤード内を移動した時の受信電力特性が確認された。
上図の濃い青色ほど受信電力が高く、ヤード内では4Kカメラ映像を安定的に伝送できる電力値であることが明らかとなり、これらの位置情報と受信電力特性の情報を活用することで、屋外実験ヤード内の建設機械2台が、往路と復路のルートに対して安全間隔を保ちながら自動走行することが可能となった。
今後は、実際の建設現場における技術検証など、4Kカメラが搭載された建機の自動走行の高度化・実用化に向けて、様々な実証実験を行っていく。
参考・画像元:熊谷組プレスリリース
WRITTEN by



建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします