
ニュース
熊谷組、河道閉塞応急復旧ロボットシステムの公開実験実施。ヘリ運搬可能な小型建設機械を遠隔操作で排水作業
熊谷組はムーンショット型研究開発事業「CAFEプロジェクト」の一環として、河道閉塞の二次的な被害を防止する技術の開発に取り組んでいる。
ヘリコプターで分解せずに運搬可能な小型の建設機械を遠隔操作し、河道閉塞の応急復旧作業を行うシステムの開発を進め、7月10日に九州大学伊都キャンパスで公開実験を実施した。
近年激甚化・頻発化する自然災害現場における応急復旧作業では、作業員の安全確保と作業の迅速化が社会的な重要課題となっている。
ムーンショット型研究開発事業では自然災害の中でも、特に斜面崩壊などで川の水の流れが堰き止められることで発生する河道閉塞に着目した。
この状況を放置すると川の上流部分に水が溜まり、やがて閉塞箇所が決壊することで下流の広範囲に二次的な被害拡大の危険性がある。

従来河道閉塞の応急復旧作業では、作業員が0.4~0.5m3級の大型の建設機械に搭乗し、機械を直接操作して排水ポンプを設置し、排水作業を行っていた。
しかし建設機械が排水ポンプを吊りながら水際の斜面に接近し、潜水士によって吊り下げたワイヤーから排水ポンプを切り離す作業には危険を伴い、山間部などへは大型の油圧ショベルを分解して運搬する必要があるため、迅速な初動対応が困難な課題があった。
同社は令和3年度よりムーンショット型研究開発事業へ参画し、ヘリコプターで分解せずに運搬可能な小型の建設機械を遠隔操作し、大型の建設機械と同等以上の性能を発揮し、排水作業を可能にするロボットシステムの開発に取り組んでいる。
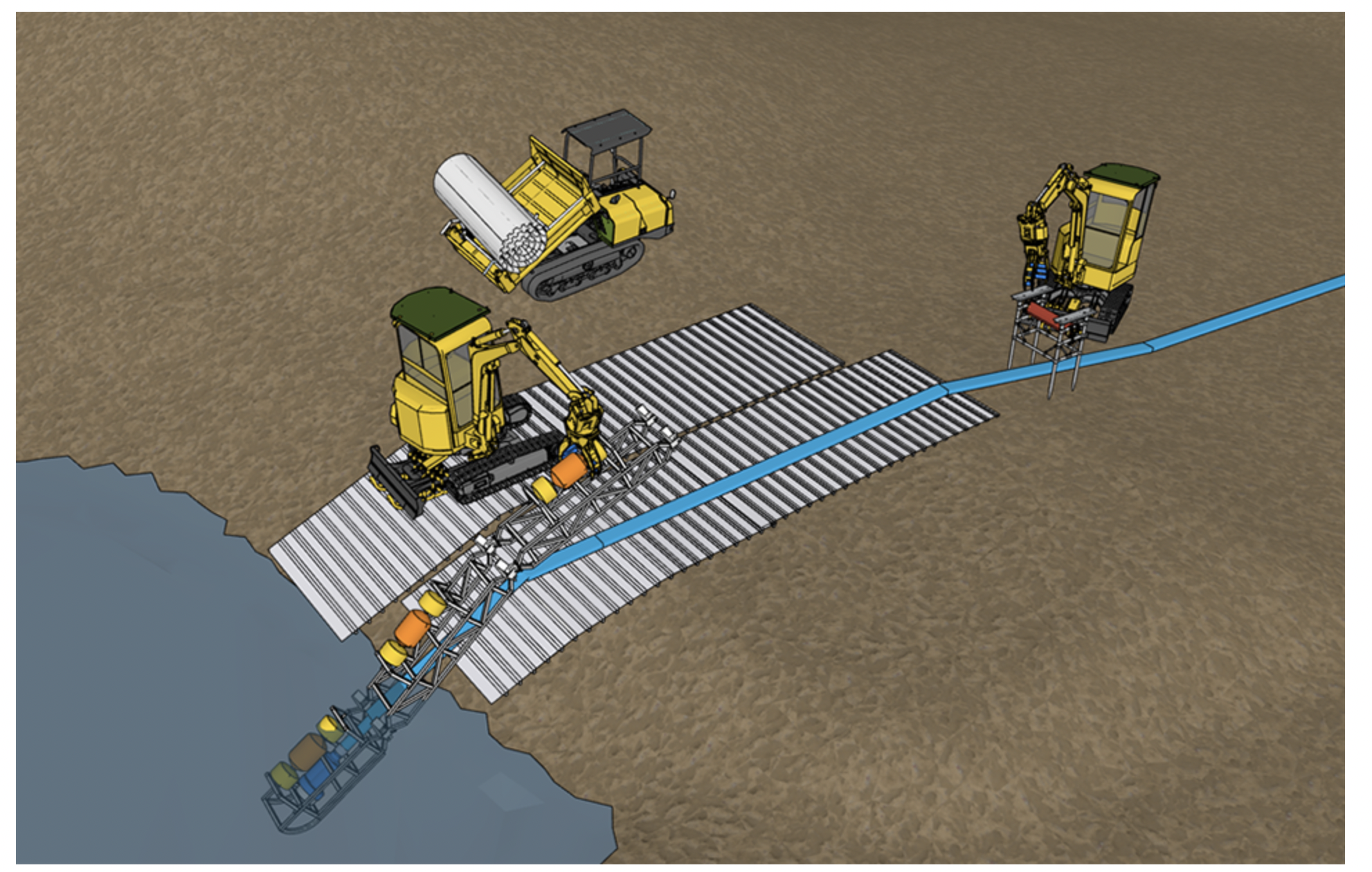
システム構成として、災害対応を目的とした遠隔操作可能な小型建設ロボット(油圧ショベル、不整地運搬車)を開発し、クローラ部が水に浸かっても稼働可能な設計となっている。
油圧ショベルのアタッチメントにはロータリーフォークを使用し、チルト機構と全旋回機構を備え、円筒形の長尺物から角材など様々な形状の物体を掴んで移動させる作業が可能である。
河道閉塞の水際では地盤が軟弱となるため、建設機械の履帯が沈み込み走行できない状況になることから、運搬が容易で建設機械の走行路を容易に確保することが可能な走行路補強マットを開発した。
このマットは合成繊維織物を素材とし、内部に塩ビ管を挿入した構造になっており、単位面積当たりの質量は7.42kg/m2で敷鉄板の24分の1の軽さである。
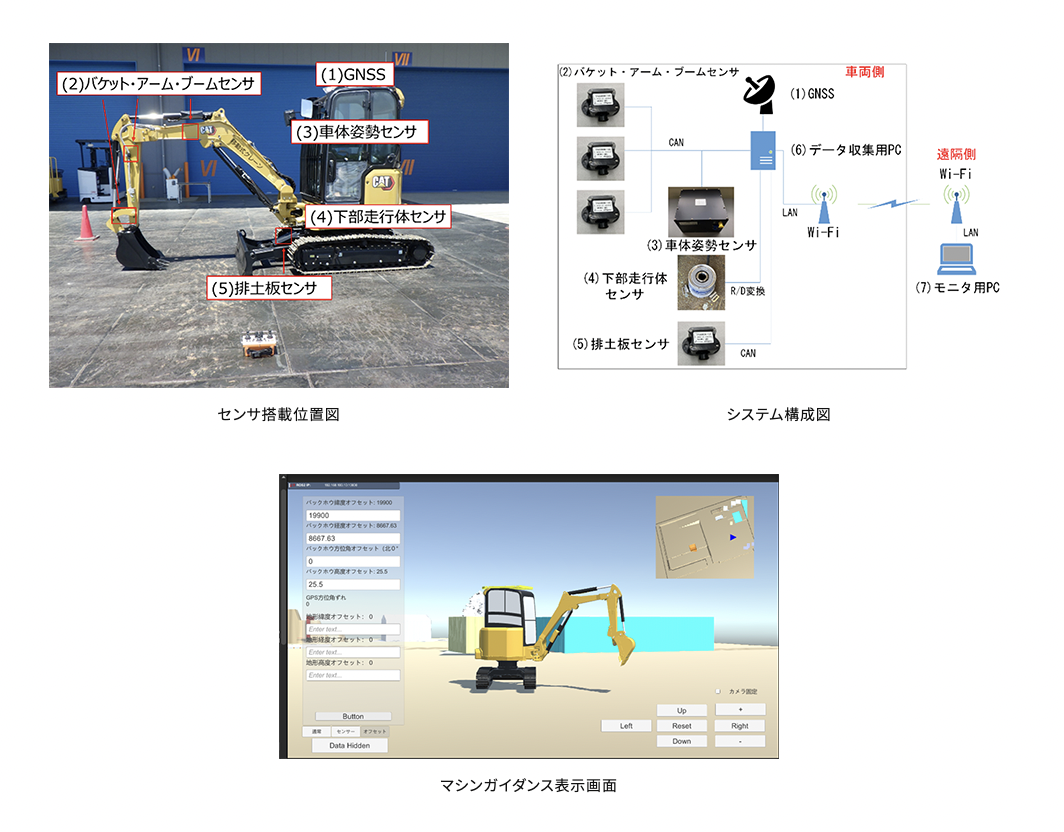
小型油圧ショベルに対応したマシンガイダンスシステムも開発し、GNSSやIMUといった高精度なセンサーを用いて車両の姿勢を詳細に表現する。
履帯方位角の正確な把握と排土板角度のリアルタイム把握により、半水中での遠隔操作時における安全な走行と効率的な作業を実現する。
今回の公開実験では小型の建設機械の遠隔操作により、河道閉塞の模擬環境において軟弱地盤上の走行路を確保するマットの設置と、溜池への排水ポンプを設置および排水作業ができることを実証した。
今後は沈砂池などがある実際の環境でこのロボットシステムを適用し、社会実装の実現を目指す。
ヘリコプターで分解せずに運搬可能な小型の建設機械を遠隔操作し、河道閉塞の応急復旧作業を行うシステムの開発を進め、7月10日に九州大学伊都キャンパスで公開実験を実施した。
敷鉄板の24分の1軽量マットで走行路確保、小型油圧ショベル対応マシンガイダンス開発
近年激甚化・頻発化する自然災害現場における応急復旧作業では、作業員の安全確保と作業の迅速化が社会的な重要課題となっている。
ムーンショット型研究開発事業では自然災害の中でも、特に斜面崩壊などで川の水の流れが堰き止められることで発生する河道閉塞に着目した。
この状況を放置すると川の上流部分に水が溜まり、やがて閉塞箇所が決壊することで下流の広範囲に二次的な被害拡大の危険性がある。
従来河道閉塞の応急復旧作業では、作業員が0.4~0.5m3級の大型の建設機械に搭乗し、機械を直接操作して排水ポンプを設置し、排水作業を行っていた。
しかし建設機械が排水ポンプを吊りながら水際の斜面に接近し、潜水士によって吊り下げたワイヤーから排水ポンプを切り離す作業には危険を伴い、山間部などへは大型の油圧ショベルを分解して運搬する必要があるため、迅速な初動対応が困難な課題があった。
同社は令和3年度よりムーンショット型研究開発事業へ参画し、ヘリコプターで分解せずに運搬可能な小型の建設機械を遠隔操作し、大型の建設機械と同等以上の性能を発揮し、排水作業を可能にするロボットシステムの開発に取り組んでいる。
システム構成として、災害対応を目的とした遠隔操作可能な小型建設ロボット(油圧ショベル、不整地運搬車)を開発し、クローラ部が水に浸かっても稼働可能な設計となっている。
油圧ショベルのアタッチメントにはロータリーフォークを使用し、チルト機構と全旋回機構を備え、円筒形の長尺物から角材など様々な形状の物体を掴んで移動させる作業が可能である。
河道閉塞の水際では地盤が軟弱となるため、建設機械の履帯が沈み込み走行できない状況になることから、運搬が容易で建設機械の走行路を容易に確保することが可能な走行路補強マットを開発した。
このマットは合成繊維織物を素材とし、内部に塩ビ管を挿入した構造になっており、単位面積当たりの質量は7.42kg/m2で敷鉄板の24分の1の軽さである。
小型油圧ショベルに対応したマシンガイダンスシステムも開発し、GNSSやIMUといった高精度なセンサーを用いて車両の姿勢を詳細に表現する。
履帯方位角の正確な把握と排土板角度のリアルタイム把握により、半水中での遠隔操作時における安全な走行と効率的な作業を実現する。
今回の公開実験では小型の建設機械の遠隔操作により、河道閉塞の模擬環境において軟弱地盤上の走行路を確保するマットの設置と、溜池への排水ポンプを設置および排水作業ができることを実証した。
今後は沈砂池などがある実際の環境でこのロボットシステムを適用し、社会実装の実現を目指す。
WRITTEN by


建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします












































