熊谷組がアーティキュレートダンプトラックの自動走行において、AI制御システムによる仮想信号式制御システムの開発を進めている。
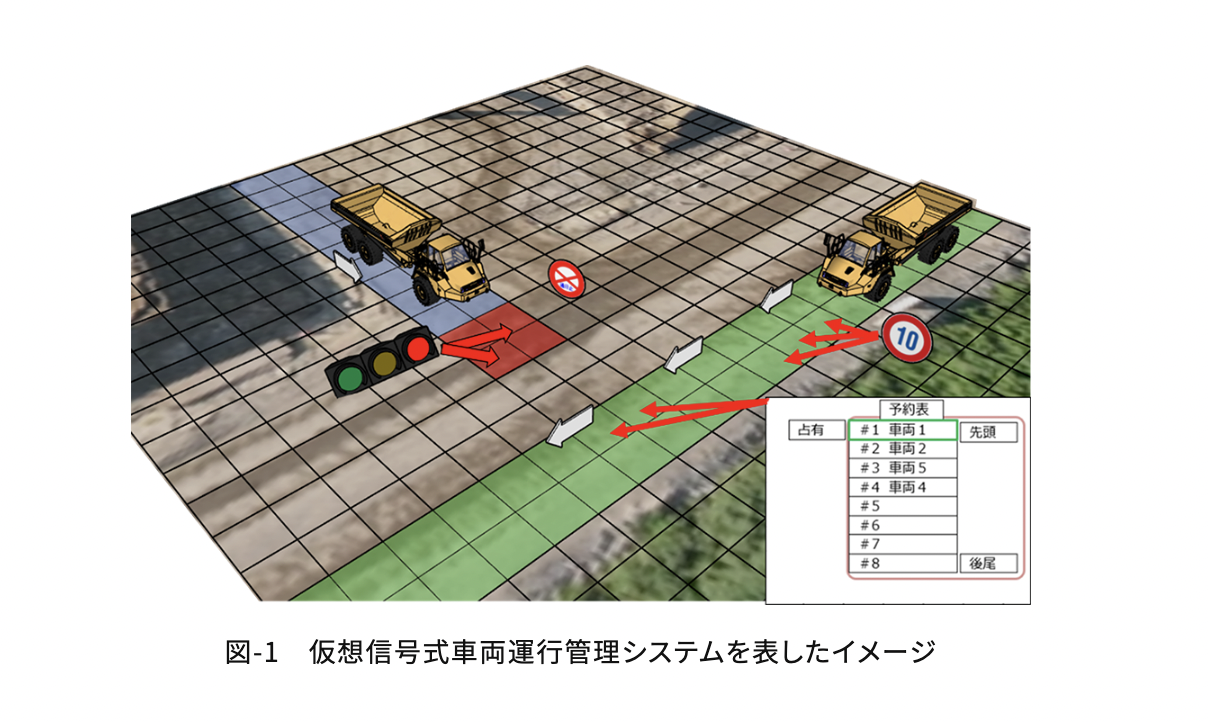
交通管理サーバーが仮想的に信号や標識を設定し、車両自身が走行判断を行う仕組みで複数台の運行管理を可能にした。
従来の自動走行システムでは、すべての走行経路と車両位置をAIが解析し、組合せ最適化を実現していたが、走行経路の複雑化や車両台数の増加に伴い計算量が膨大になる課題があった。
新開発の仮想信号式車両運行管理システムでは、あらかじめ作成した経路上に仮想的な信号や標識などの情報を組み込むことで、車両が主体となって交通管理サーバーに問い合わせる仕組みを構築している。
開発に使用したCaterpillar社製725(最大積載量24t)は、10tダンプトラックと比較して接地圧が小さく、油圧式のアーティキュレート機構により狭い箇所での作業が可能な特徴を持つ。
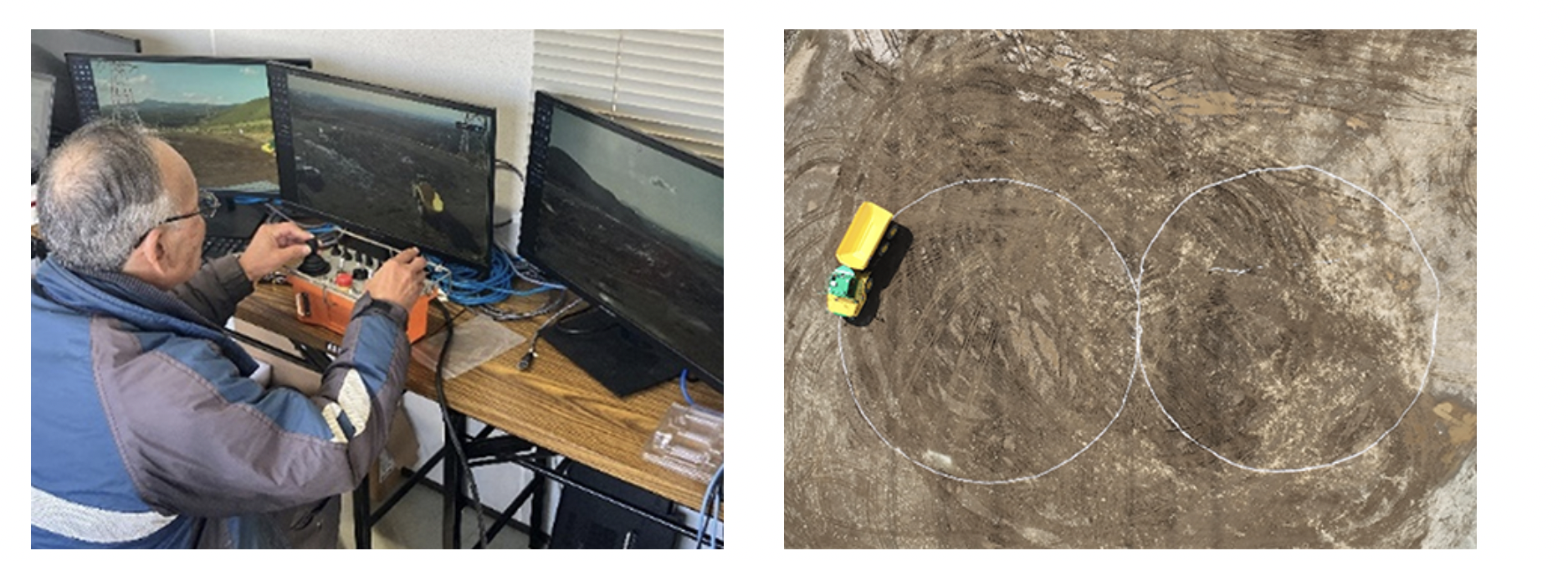
2025年4月の施工現場での実験では、一直線、楕円状、八の字といった経路に対する経路追従性能を確認し、30cm程度の横ずれで自動停止する安全機能も検証された。
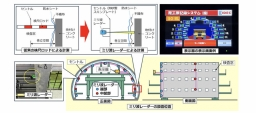
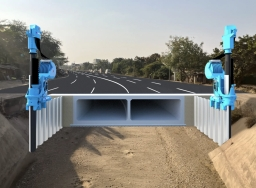
同システムの導入により、狭隘なトンネル現場から大規模なダム現場、軟弱な地盤が課題となる災害復旧現場まで幅広い活用が期待されている。
交通管理サーバーが仮想的に信号や標識を設定し、車両自身が走行判断を行う仕組みで複数台の運行管理を可能にした。
計算量課題を解決し幅広い現場への展開目指す
従来の自動走行システムでは、すべての走行経路と車両位置をAIが解析し、組合せ最適化を実現していたが、走行経路の複雑化や車両台数の増加に伴い計算量が膨大になる課題があった。
新開発の仮想信号式車両運行管理システムでは、あらかじめ作成した経路上に仮想的な信号や標識などの情報を組み込むことで、車両が主体となって交通管理サーバーに問い合わせる仕組みを構築している。
開発に使用したCaterpillar社製725(最大積載量24t)は、10tダンプトラックと比較して接地圧が小さく、油圧式のアーティキュレート機構により狭い箇所での作業が可能な特徴を持つ。
 (自動走行対応アーティキュレートダンプトラック)
(自動走行対応アーティキュレートダンプトラック)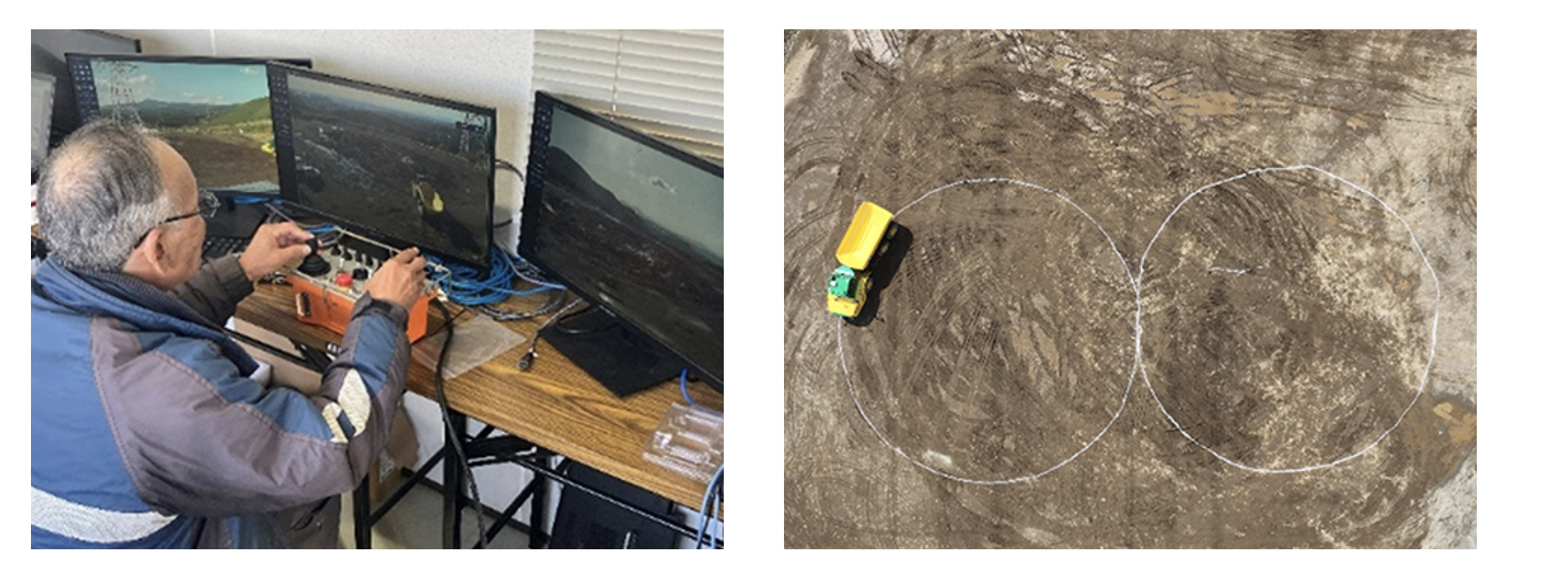 (左:
(左:2025年4月の施工現場での実験では、一直線、楕円状、八の字といった経路に対する経路追従性能を確認し、30cm程度の横ずれで自動停止する安全機能も検証された。
同システムの導入により、狭隘なトンネル現場から大規模なダム現場、軟弱な地盤が課題となる災害復旧現場まで幅広い活用が期待されている。
WRITTEN by


建設土木のICT活用など、
デジコンからの最新情報をメールでお届けします