
奥村組と西松建設は2026年6月12日、シールド工事の掘進管理測量において、4足歩行ロボットとロボットアームで既知点へのプリズム据付作業を自動化するシステム「わんワン測量™」を共同開発した。
西松建設の遠隔測量システムと組み合わせることで、シールド坑内の掘進管理測量を完全無人化できる。6月17〜20日のCSPI2026(幕張メッセ)の西松建設ブースで両社が共同展示する。
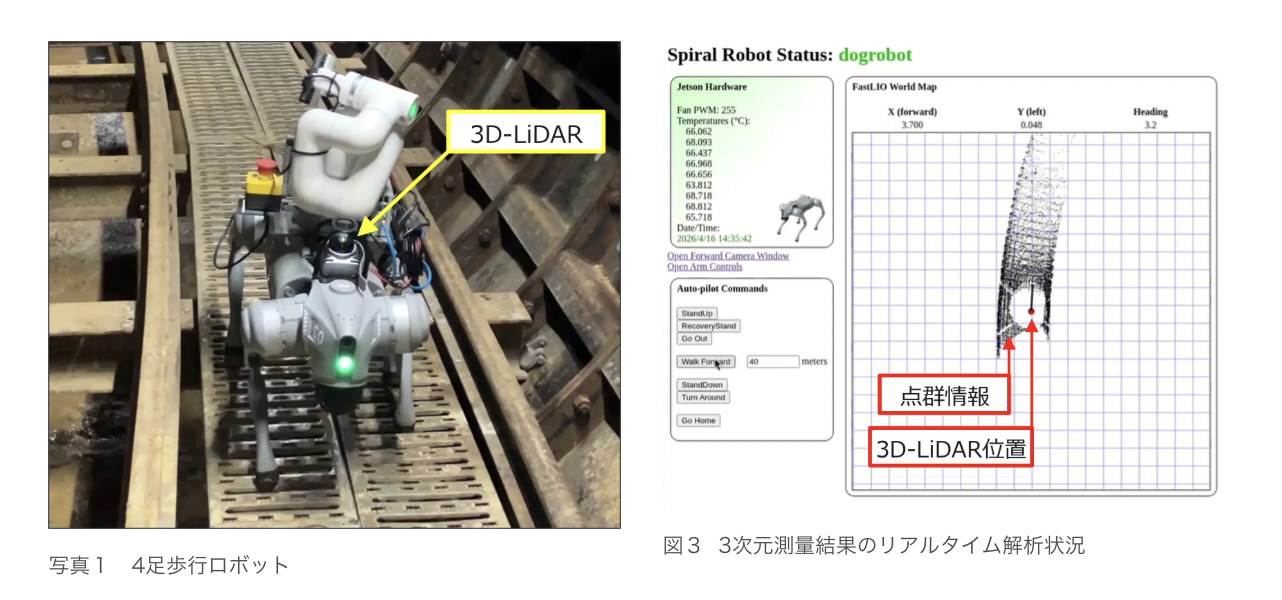
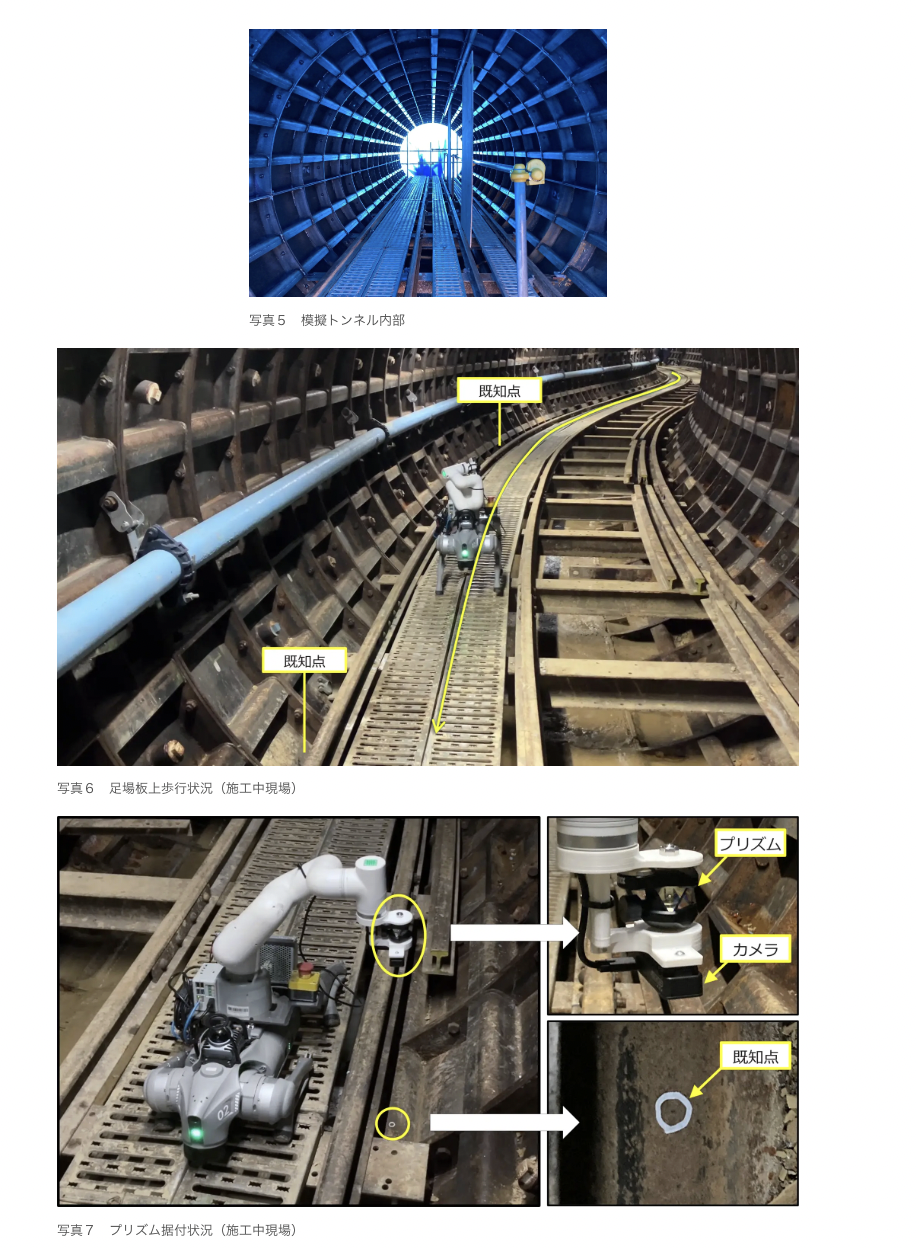
本システムの核心は4足歩行ロボットによる自律移動と、ロボットアーム先端カメラ×AIによるプリズムの精密据付だ。
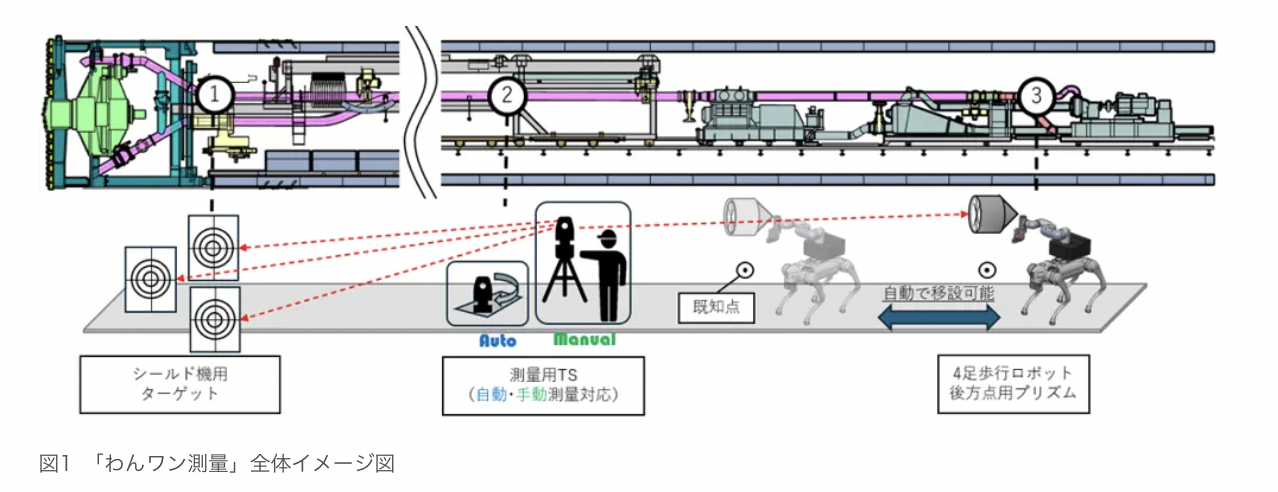
ロボットはトンネルの線形や軌条設備に依存せず足場板上を柔軟に移動でき、搭載した3D-LiDARの点群データで既知点座標を参照しながら自律的に移動・プリズムを設置する。
ロボットアームが既知点の鉛直上に±2mm程度の精度でプリズムを据え付けられることを実証試験で確認した。

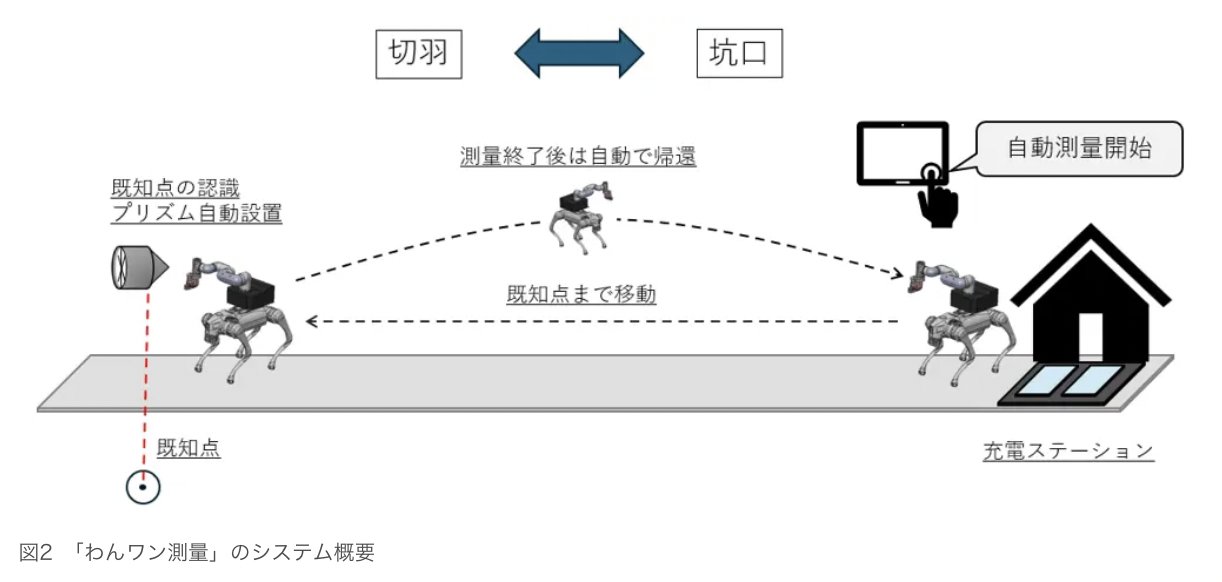
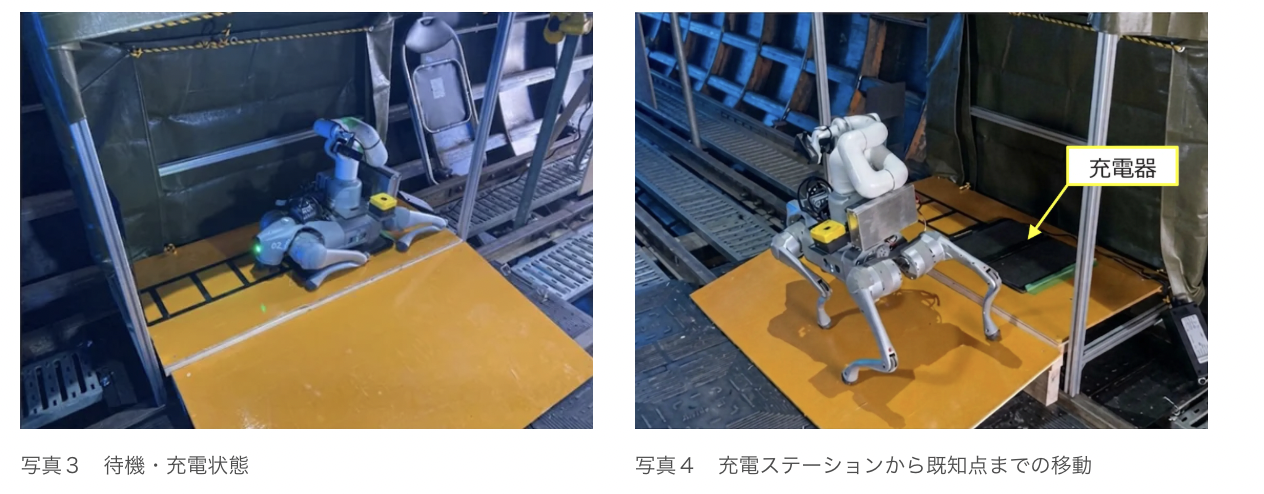
遠隔操作による自動発進・帰還機能を備えており、後方台車に設置した自動充電ステーション(通称「犬小屋」)から自動起動し測量終了後に自動帰還・充電する。
急曲線区間(曲線半径35m)での安定歩行も確認済みだ。
従来の坑内測量は掘進作業終了後に作業員が坑内に入り長距離を移動しながら手作業でプリズムを設置する必要があり、特に小口径シールドトンネルでは狭隘空間での作業が作業員に大きな身体的負担と残業を招いていた。
「わんワン測量」はこれらの課題を根本的に解消し、測量精度の均一化と省人化・安全性向上を同時に実現する。両社を中心に特許を共同出願中だ。

参考・画像元:株式会社奥村組 プレスリリースより
西松建設の遠隔測量システムと組み合わせることで、シールド坑内の掘進管理測量を完全無人化できる。6月17〜20日のCSPI2026(幕張メッセ)の西松建設ブースで両社が共同展示する。
3D-LiDARで坑内を自律移動し既知点に到着→ロボットアームがAIでプリズムを精密設置。急曲線35mにも対応
本システムの核心は4足歩行ロボットによる自律移動と、ロボットアーム先端カメラ×AIによるプリズムの精密据付だ。
ロボットはトンネルの線形や軌条設備に依存せず足場板上を柔軟に移動でき、搭載した3D-LiDARの点群データで既知点座標を参照しながら自律的に移動・プリズムを設置する。
ロボットアームが既知点の鉛直上に±2mm程度の精度でプリズムを据え付けられることを実証試験で確認した。
遠隔操作による自動発進・帰還機能を備えており、後方台車に設置した自動充電ステーション(通称「犬小屋」)から自動起動し測量終了後に自動帰還・充電する。
急曲線区間(曲線半径35m)での安定歩行も確認済みだ。
狭隘な小口径シールドでの作業員の身体的負担と残業を解消へ。特許出願中
従来の坑内測量は掘進作業終了後に作業員が坑内に入り長距離を移動しながら手作業でプリズムを設置する必要があり、特に小口径シールドトンネルでは狭隘空間での作業が作業員に大きな身体的負担と残業を招いていた。
「わんワン測量」はこれらの課題を根本的に解消し、測量精度の均一化と省人化・安全性向上を同時に実現する。両社を中心に特許を共同出願中だ。
参考・画像元:株式会社奥村組 プレスリリースより
WRITTEN by
