

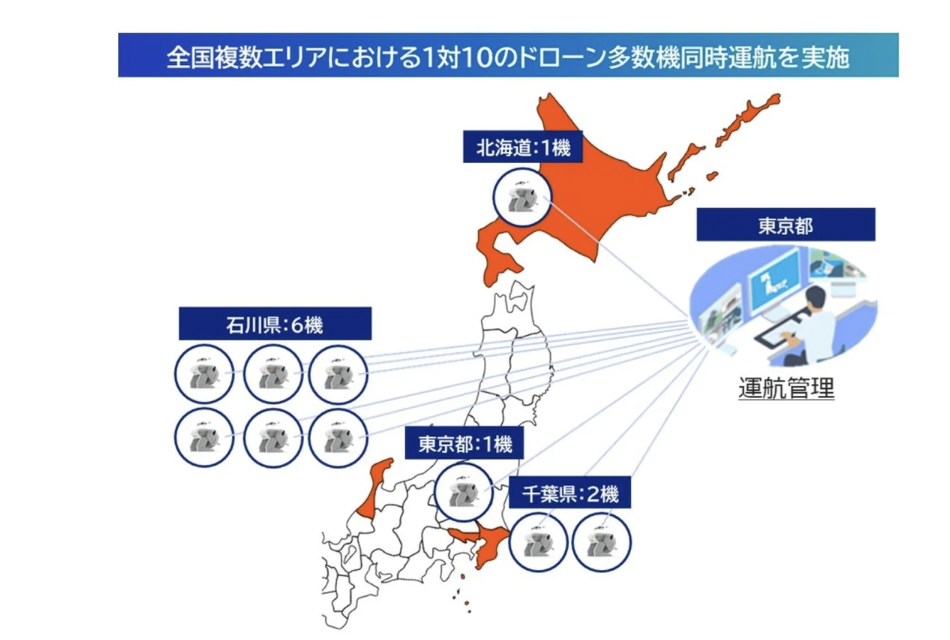
KDDIとKDDIスマートドローンは2026年3月23日〜4月27日にかけて、1人の遠隔操縦者が北海道・千葉県・東京都・石川県の複数拠点に設置したドローンポートから10機のドローンを同時運航する実証に成功したと発表した。
NEDOの「次世代空モビリティの社会実装に向けた実現プロジェクト(ReAMoプロジェクト)」の一環で、ドローンのカメラ映像の常時監視に依存しない新たな運航管理体制の有効性を確認した。
従来の多数機同時運航では操縦者がカメラ映像を常時監視し続ける必要があり、認知負荷の増大から安全に管理できる同時運航機数は最大5台程度が限界だった。
今回の実証では東京の拠点から運航管理システム(UTM)を用いてテレメトリー情報(機体情報・バッテリー残量・位置・高度など)を一元管理することで、カメラ映像の常時監視に依存しない運航が可能であることを確認した。

10機同時運航中に複数機体でバッテリー残量低下という異常を同時発生させた場合でも、テレメトリー情報から速やかに異常を検知し、優先順位を判断して全機を安全に緊急着陸させる手順の有効性も確認された。
また視線計測とNASA-TLX(作業負荷評価指標)による検証により、テレメトリー情報主軸の監視が操縦者の集中力の持続と疲労軽減に有効であることも確認した。
KDDIは2024年6月のJALとの3機同時運航、同年11月の全国4地点・5機同時運航に続き、今回10機への拡大に成功した。
全国1,000拠点へのAIドローン配備による「全国どこでも10分以内に遠隔操縦で駆け付けられるドローンの社会基盤化」を最終目標に据えており、今回の知見を社会実装のさらなる加速に活用していく方針だ。
NEDOの「次世代空モビリティの社会実装に向けた実現プロジェクト(ReAMoプロジェクト)」の一環で、ドローンのカメラ映像の常時監視に依存しない新たな運航管理体制の有効性を確認した。
カメラ映像からテレメトリー情報主軸の監視へ転換。UTMで10機の位置・バッテリー・高度を一元管理
従来の多数機同時運航では操縦者がカメラ映像を常時監視し続ける必要があり、認知負荷の増大から安全に管理できる同時運航機数は最大5台程度が限界だった。
今回の実証では東京の拠点から運航管理システム(UTM)を用いてテレメトリー情報(機体情報・バッテリー残量・位置・高度など)を一元管理することで、カメラ映像の常時監視に依存しない運航が可能であることを確認した。
10機同時運航中に複数機体でバッテリー残量低下という異常を同時発生させた場合でも、テレメトリー情報から速やかに異常を検知し、優先順位を判断して全機を安全に緊急着陸させる手順の有効性も確認された。
また視線計測とNASA-TLX(作業負荷評価指標)による検証により、テレメトリー情報主軸の監視が操縦者の集中力の持続と疲労軽減に有効であることも確認した。
2024年の3機・5機から2年で10機へ。全国1,000拠点・10分以内の社会基盤化を目指す
KDDIは2024年6月のJALとの3機同時運航、同年11月の全国4地点・5機同時運航に続き、今回10機への拡大に成功した。
全国1,000拠点へのAIドローン配備による「全国どこでも10分以内に遠隔操縦で駆け付けられるドローンの社会基盤化」を最終目標に据えており、今回の知見を社会実装のさらなる加速に活用していく方針だ。
WRITTEN by
