
NTT・エヌ・ティ・ティ エムイー・NTT e-Drone Technologyの3社は2026年5月14日、無線区間で発生する遅延揺らぎを低減して映像品質を安定化する技術を開発し、約60km離れた拠点間での遠隔ドローン操縦環境を構築して実証したと発表した。
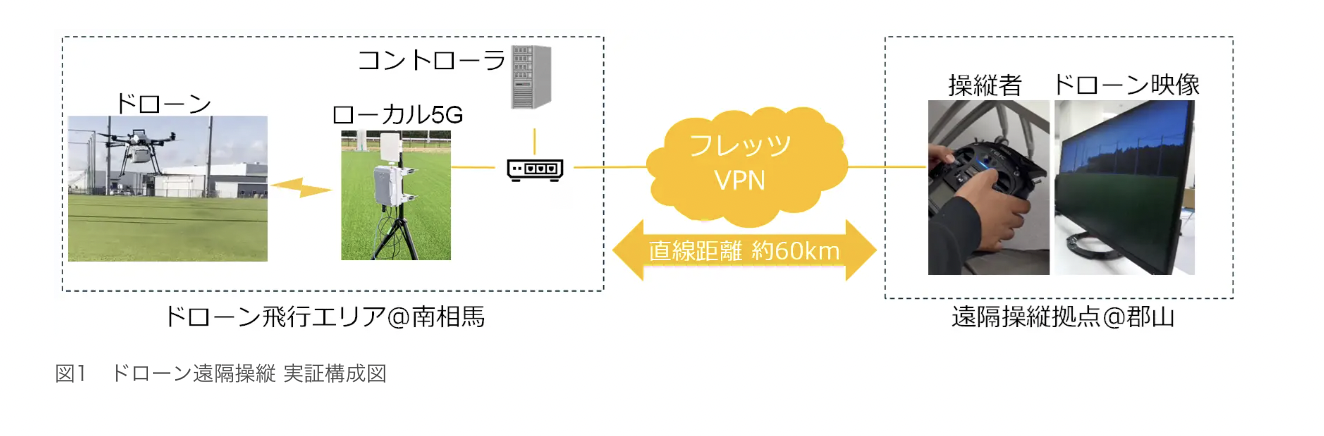
福島県南相馬市のロボットテストフィールドに配置したドローンを郡山市から、ローカル5GとフレッツVPNを介して遠隔操縦し、本技術の有効性を確認した。
ドローンの遠隔操縦で課題となっていたのは、無線区間での再送制御などに起因する遅延の「揺らぎ」だ。パケットの遅延に揺らぎが発生すると映像フレームが乱れ、操縦精度の低下につながる。
今回開発した技術は3ステップで構成される。まず無線基地局から随時トラフィック情報を収集し、映像レートの変化に追従する。
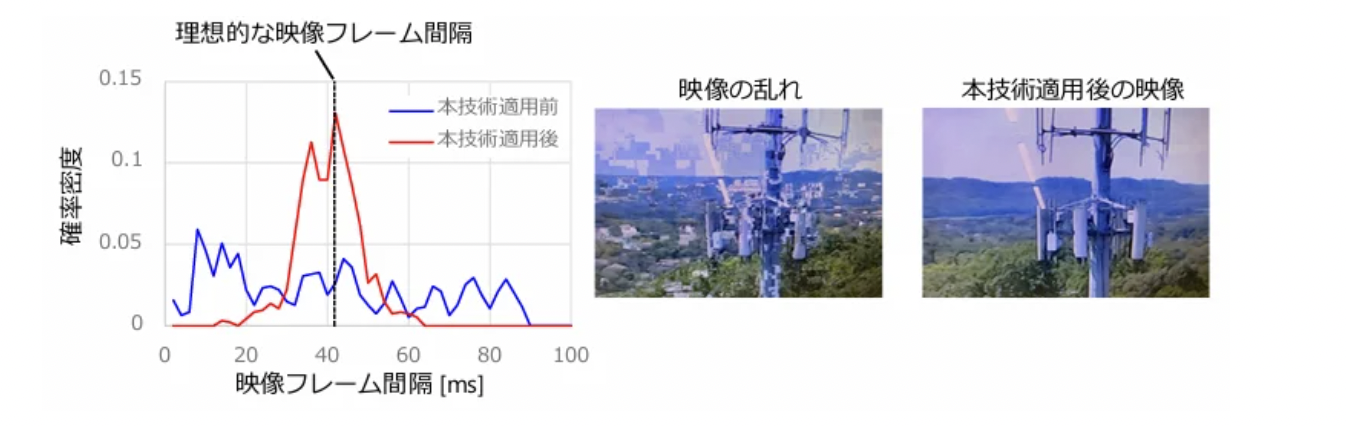
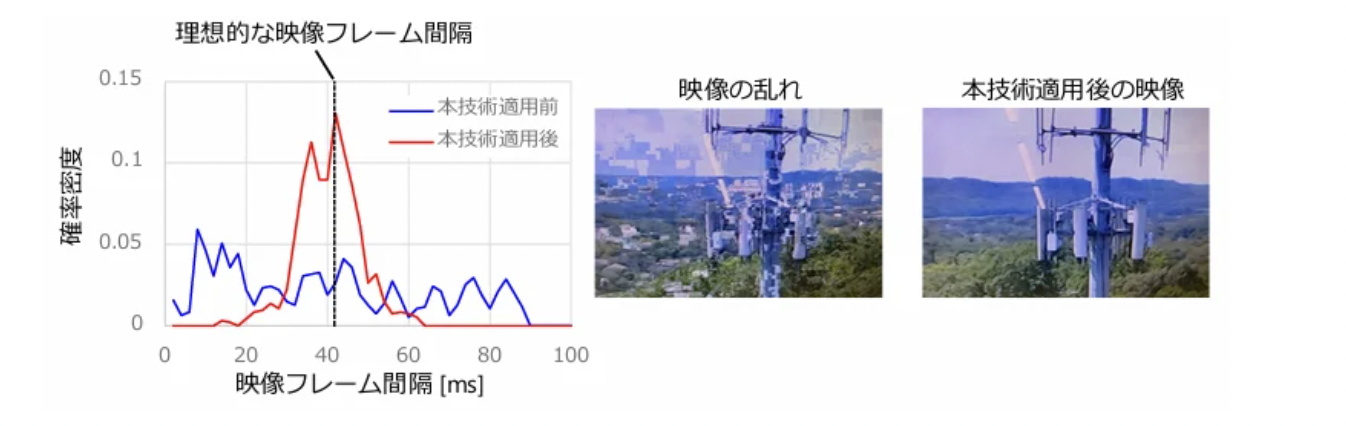
次に収集情報から正確な映像レートを算出し、映像レートに合わせたシェーピング制御により光ネットワーク装置でフレーム間隔を補正する「光無線連携制御」を実現した。
この技術の適用により、高負荷な映像伝送時に12%の時間で発生していた映像乱れを5%まで低減した。
また遠隔操縦での目的地への平均移動時間が現地目視操作の35秒に対して32秒と同等水準となり、操縦に影響のない映像品質を実現できることを確認した。
本技術は建設現場や工場内のように点検箇所が日によって変わる場合や比較的狭い空間での精密な遠隔操縦に特に有効で、現地派遣なく点検業務を実施できる可能性を示した。
ドローンに限らず無人航空機・ロボットの操縦など幅広い遠隔オペレーション業務への展開を目指しており、5月27日〜28日の「つくばフォーラム2026」でも展示される。
福島県南相馬市のロボットテストフィールドに配置したドローンを郡山市から、ローカル5GとフレッツVPNを介して遠隔操縦し、本技術の有効性を確認した。
映像乱れを12%から5%へ低減。無線基地局のトラフィック情報を収集・分析して光区間でフレーム間隔を補正
ドローンの遠隔操縦で課題となっていたのは、無線区間での再送制御などに起因する遅延の「揺らぎ」だ。パケットの遅延に揺らぎが発生すると映像フレームが乱れ、操縦精度の低下につながる。
今回開発した技術は3ステップで構成される。まず無線基地局から随時トラフィック情報を収集し、映像レートの変化に追従する。
次に収集情報から正確な映像レートを算出し、映像レートに合わせたシェーピング制御により光ネットワーク装置でフレーム間隔を補正する「光無線連携制御」を実現した。
この技術の適用により、高負荷な映像伝送時に12%の時間で発生していた映像乱れを5%まで低減した。
また遠隔操縦での目的地への平均移動時間が現地目視操作の35秒に対して32秒と同等水準となり、操縦に影響のない映像品質を実現できることを確認した。
ドローン・無人航空機・ロボット操縦への幅広い展開へ。建設現場の遠隔点検にも活用可能
本技術は建設現場や工場内のように点検箇所が日によって変わる場合や比較的狭い空間での精密な遠隔操縦に特に有効で、現地派遣なく点検業務を実施できる可能性を示した。
ドローンに限らず無人航空機・ロボットの操縦など幅広い遠隔オペレーション業務への展開を目指しており、5月27日〜28日の「つくばフォーラム2026」でも展示される。
WRITTEN by
