ニュース
LiDAR点群でトンネル内空間をデジタル資産化し飛行計画を自動生成・自律飛行まで一体実現。ネクストウェアが地下構造物向け自律型ドローン点検技術の実証で良好な成果を確認


ネクストウェア大阪府大阪市)は2026年4月15日、地下構造物点検の高度化を目的として実施してきた自動・自律型ドローン点検技術の実証検証プロジェクトにおいて、所期の目的に沿った良好な成果が得られたと発表した。
「撮影品質基準」「空間理解」から「飛行計画」「自動・自律飛行制御」に至る一連の技術要素を統合した点検基盤の確立に向けた重要な進展となる。
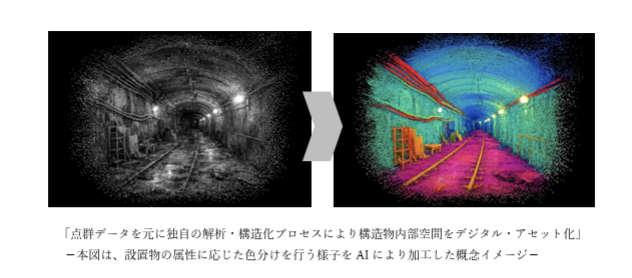
今回の実証で確認された主な成果は5点だ。まず空間理解とデジタル資産化では、LiDAR点群データをもとに地下構造物の空間構造・壁面・設備配置・障害物を高精度に認識・分類し、独自の多層的な解析・構造化プロセスで統合することでドローン運用に適した空間モデルを生成する技術の有効性を確認した。
次に飛行計画と撮影条件の自動生成では、生成した空間モデルをもとに障害物を考慮した飛行経路と壁面等への最適な撮影条件(解像度・距離・角度・シャッター速度等)を自動設定し、点検品質の均一化と再現性向上に資する技術の有効性を確認した。
自律飛行制御では動的障害物への回避動作・通信不良環境での飛行継続やリターン・トゥ・ホーム等のフェイルセーフ機能の実証環境での動作を確認した。
シミュレーション環境との連携検証では、構築した空間モデルをシミュレーション環境に反映して風環境等の条件付きの飛行検証が可能なことも確認した。
これらの技術を統合した「3D Map Converter(空間モデル生成)」と「Flight Planner(飛行および撮影計画生成)」の主要ソフトウェア基盤が整備され、製品化に向けた見通しを得ている。
開発にはAnthropicの生成AIを活用しており、開発効率の向上と高度なアルゴリズム設計の両立を図っている。
今後は複数の異なる地下構造物での検証継続・ソフトウェアのUX向上・飛行計画パラメータの自動設定・AI技術や異常予兆検知との連携強化を経て、インフラ点検分野での実運用と事業化を目指す。
参考・画像元:ネクストウェア株式会社 プレスリリースより
「トンネルや地下施設をドローンが自律的に点検する」——その実現に必要な空間認識から自律飛行まで一気通貫の技術基盤をネクストウェアが確立しつつあります🚇 LiDARでデジタル化した地下空間を「地図」として飛行計画を自動生成する仕組みは、老朽化が加速するインフラ点検の切り札になりそうですね!
「撮影品質基準」「空間理解」から「飛行計画」「自動・自律飛行制御」に至る一連の技術要素を統合した点検基盤の確立に向けた重要な進展となる。
LiDAR点群で構造物内部を多層的に解析・構造化しドローン運用に適した「デジタル・アセット」を生成。飛行計画と撮影条件も自動生成
今回の実証で確認された主な成果は5点だ。まず空間理解とデジタル資産化では、LiDAR点群データをもとに地下構造物の空間構造・壁面・設備配置・障害物を高精度に認識・分類し、独自の多層的な解析・構造化プロセスで統合することでドローン運用に適した空間モデルを生成する技術の有効性を確認した。
次に飛行計画と撮影条件の自動生成では、生成した空間モデルをもとに障害物を考慮した飛行経路と壁面等への最適な撮影条件(解像度・距離・角度・シャッター速度等)を自動設定し、点検品質の均一化と再現性向上に資する技術の有効性を確認した。
自律飛行制御では動的障害物への回避動作・通信不良環境での飛行継続やリターン・トゥ・ホーム等のフェイルセーフ機能の実証環境での動作を確認した。
シミュレーション環境との連携検証では、構築した空間モデルをシミュレーション環境に反映して風環境等の条件付きの飛行検証が可能なことも確認した。
3D Map Converter×Flight Plannerのソフトウェア基盤が整備。操縦者技能への依存と撮影品質のばらつきを解消へ
これらの技術を統合した「3D Map Converter(空間モデル生成)」と「Flight Planner(飛行および撮影計画生成)」の主要ソフトウェア基盤が整備され、製品化に向けた見通しを得ている。
開発にはAnthropicの生成AIを活用しており、開発効率の向上と高度なアルゴリズム設計の両立を図っている。
今後は複数の異なる地下構造物での検証継続・ソフトウェアのUX向上・飛行計画パラメータの自動設定・AI技術や異常予兆検知との連携強化を経て、インフラ点検分野での実運用と事業化を目指す。
参考・画像元:ネクストウェア株式会社 プレスリリースより
「トンネルや地下施設をドローンが自律的に点検する」——その実現に必要な空間認識から自律飛行まで一気通貫の技術基盤をネクストウェアが確立しつつあります🚇 LiDARでデジタル化した地下空間を「地図」として飛行計画を自動生成する仕組みは、老朽化が加速するインフラ点検の切り札になりそうですね!
WRITTEN by
