
NTTドコモビジネスを代表機関とするコンソーシアム8社は2026年1月16日、横浜市において、自動運転バスの走行に関する実証実験を1月17日から1月22日まで実施すると発表した。
今回の実証実験では、ローカル5Gや路側インフラ(スマート道路灯など)を活用し、都市部の狭い道路や混雑エリアにおける自動運転レベル4の安定運行モデルを検証する。
昨年度、よこはま動物園ズーラシア周辺で行われた実証実験を基に、今年度は走行区間を約5倍の往復約10.6kmに拡大して実施される。
本実証の最大の狙いは、狭あい道路や見通しの悪い交差点での「路車協調」技術の検証にある。
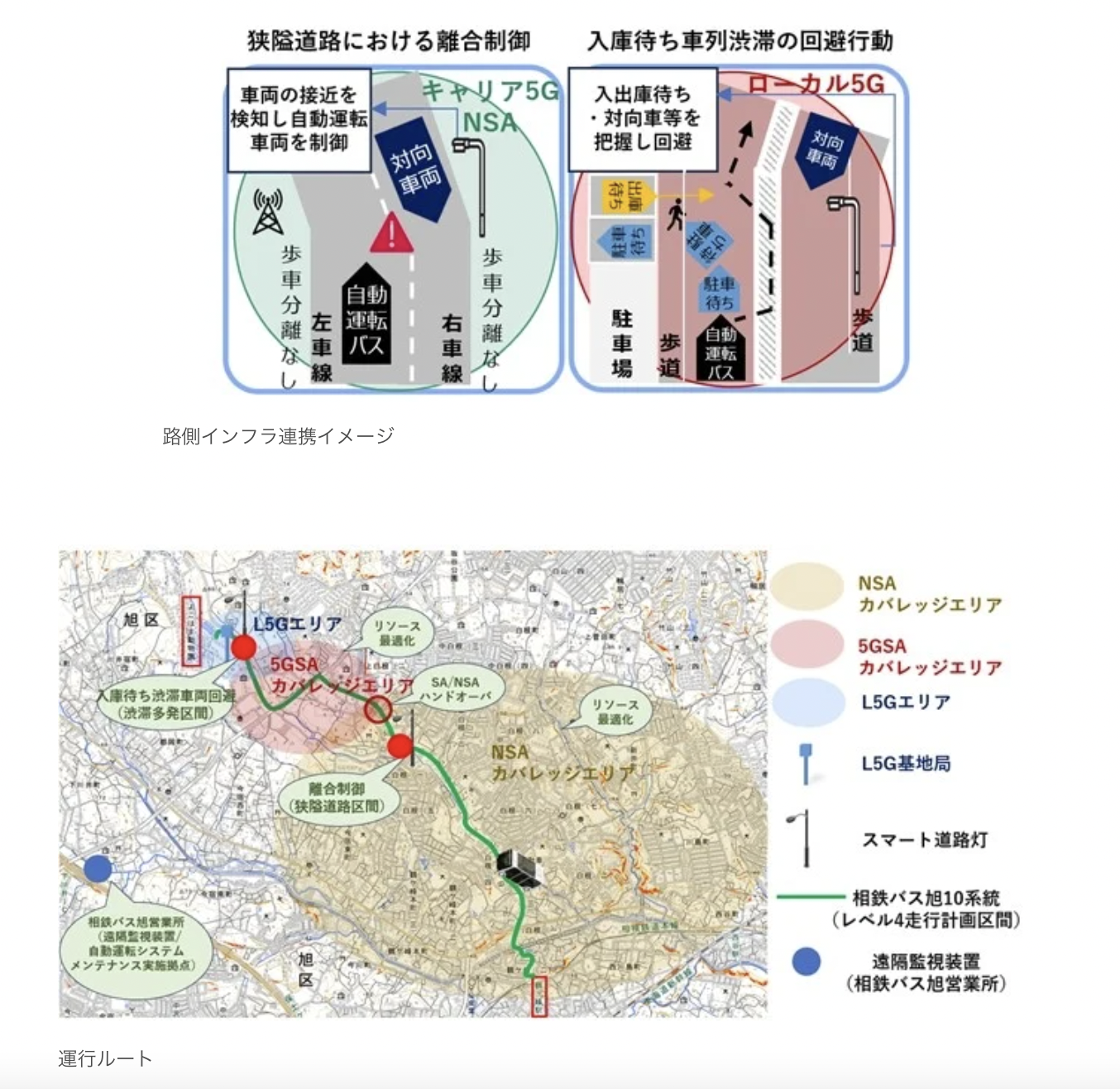
車両に搭載されたセンサーだけでなく、道路側に設置されたカメラやLiDAR(スマート道路灯)からの情報を、ローカル5Gとキャリア5Gを併用してリアルタイムに収集・統合する。
これにより、対向車とのすれ違い(離合)や、死角からの飛び出しを事前に検知し、自動停止や減速といった車両制御に反映させることで、安全な自動運転を実現する。
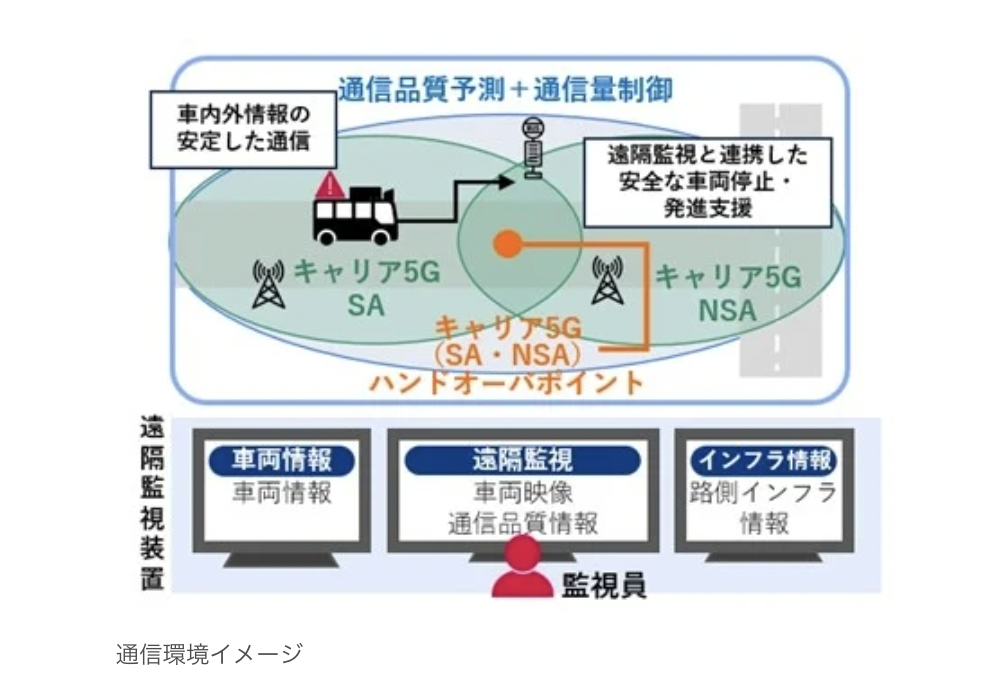
また、効率的な運行管理を目指し、1名の監視員で2台の車両を同時に遠隔監視する「1:2遠隔監視」体制の構築にも取り組む。
通信品質を予測して制御する技術「Cradio」や、ネットワークスライシングなどを活用し、通信環境が変動しやすい都市部でも、高画質な監視映像を安定して伝送できるかを確認する。
コンソーシアムは、本実証を通じて得られた知見を基に、同様の交通課題を抱える他都市への展開を図り、2027年度までに想定される全国展開フェーズに向けた技術基盤の確立を目指す。
今回の実証実験では、ローカル5Gや路側インフラ(スマート道路灯など)を活用し、都市部の狭い道路や混雑エリアにおける自動運転レベル4の安定運行モデルを検証する。
昨年度、よこはま動物園ズーラシア周辺で行われた実証実験を基に、今年度は走行区間を約5倍の往復約10.6kmに拡大して実施される。
狭い道も「路車協調」でスムーズに
本実証の最大の狙いは、狭あい道路や見通しの悪い交差点での「路車協調」技術の検証にある。
車両に搭載されたセンサーだけでなく、道路側に設置されたカメラやLiDAR(スマート道路灯)からの情報を、ローカル5Gとキャリア5Gを併用してリアルタイムに収集・統合する。
これにより、対向車とのすれ違い(離合)や、死角からの飛び出しを事前に検知し、自動停止や減速といった車両制御に反映させることで、安全な自動運転を実現する。
1人で2台を遠隔監視。通信最適化技術も投入
また、効率的な運行管理を目指し、1名の監視員で2台の車両を同時に遠隔監視する「1:2遠隔監視」体制の構築にも取り組む。
通信品質を予測して制御する技術「Cradio」や、ネットワークスライシングなどを活用し、通信環境が変動しやすい都市部でも、高画質な監視映像を安定して伝送できるかを確認する。
実証概要
- 期間: 2026年1月17日~1月22日
- 場所: 相鉄本線鶴ケ峰駅 ~ よこはま動物園北門(往復約10.6km)
- 車両: 日野自動車「ポンチョ」(自動運転レベル2で走行) 2台
- 一般試乗: 事前予約制(無料)
コンソーシアムは、本実証を通じて得られた知見を基に、同様の交通課題を抱える他都市への展開を図り、2027年度までに想定される全国展開フェーズに向けた技術基盤の確立を目指す。
WRITTEN by
