ニュース
安藤ハザマ、コベルコ建機、実作業環境において油圧ショベルの自動運転を実証。高度化、実用化に向け大きく前進

安藤ハザマとコベルコ建機は、建設現場の実際の作業環境における油圧ショベルの自動運転を実証した。
両社は油圧ショベルの自動運転推進に向けた研究開発を促進するために、2019年4月に共同研究に関する協定を締結。共同研究において、コベルコ建機は主に油圧ショベルシステムの自動運転システム開発を、安藤ハザマは現場へ適用するための施工と安全に対する管理システム開発や現場運用ルール化を担っている。
2019年秋にはティーチングとプレイバック※による油圧ショベルの単純な自動運転の実証実験を、2020年秋には土砂形状、ダンプトラックの荷台位置をAIで認知し、掘削、積み込み位置を自動調整することで現場の状況変化に対応できることの実証実験を行った。

さらに2021年12月、安藤ハザマが施工中の工事現場の実作業環境において油圧ショベルの自動運転の実証実験を実施。今回の実証実験は、2019年より両社が共同で実施している建機の自動運転技術の確立に向けた取組みをより高度化したもので、実作業現場で求められる様々な制約条件(ダンプトラックの横方向からの積み込み、土砂をこぼさないような滑らかな動作、周辺物との接触回避)に適応させた。
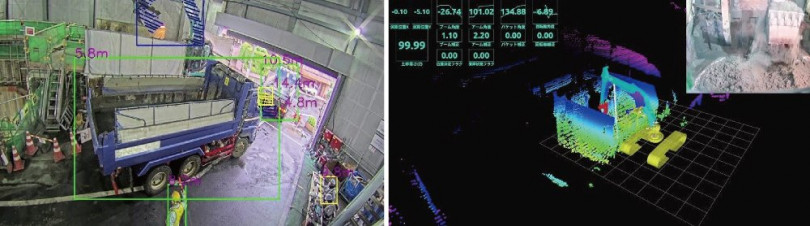 (左:監視支援システムによる検知イメージ、右:自動運転の検知イメージ)
(左:監視支援システムによる検知イメージ、右:自動運転の検知イメージ)
また、ペイロード機能を搭載することにより、積み込んだ積算重量が目標値となるまで自動運転が継続され、掘削毎に変化する掘削重量を把握しながら最適な積み込み作業が可能となっている。
安全面では、油圧ショベルの稼働範囲に近づく物体を監視支援する装置を現場に設置し、その有効性検証も同時に行った。AIにより侵入物体や人を検知・認識、距離測定することで、その情報から危険度に応じた各種警報を自動的に発報。安全性の向上と常に人間が目で見て判断する監視作業の負担軽減につながる。
今回の実証実験により、実作業環境においても自動運転に必要とされる基本的な機能や安全確保の仕組みが問題なく動作することを確認できたことで、建設現場での生産性向上や安全確保に向けた自動運転の実用化に大きく近づいた。
両社は油圧ショベルの自動運転推進に向けた研究開発を促進するために、2019年4月に共同研究に関する協定を締結。共同研究において、コベルコ建機は主に油圧ショベルシステムの自動運転システム開発を、安藤ハザマは現場へ適用するための施工と安全に対する管理システム開発や現場運用ルール化を担っている。
2019年秋にはティーチングとプレイバック※による油圧ショベルの単純な自動運転の実証実験を、2020年秋には土砂形状、ダンプトラックの荷台位置をAIで認知し、掘削、積み込み位置を自動調整することで現場の状況変化に対応できることの実証実験を行った。
さらに2021年12月、安藤ハザマが施工中の工事現場の実作業環境において油圧ショベルの自動運転の実証実験を実施。今回の実証実験は、2019年より両社が共同で実施している建機の自動運転技術の確立に向けた取組みをより高度化したもので、実作業現場で求められる様々な制約条件(ダンプトラックの横方向からの積み込み、土砂をこぼさないような滑らかな動作、周辺物との接触回避)に適応させた。
(左:監視支援システムによる検知イメージ、右:自動運転の検知イメージ)また、ペイロード機能を搭載することにより、積み込んだ積算重量が目標値となるまで自動運転が継続され、掘削毎に変化する掘削重量を把握しながら最適な積み込み作業が可能となっている。
安全面では、油圧ショベルの稼働範囲に近づく物体を監視支援する装置を現場に設置し、その有効性検証も同時に行った。AIにより侵入物体や人を検知・認識、距離測定することで、その情報から危険度に応じた各種警報を自動的に発報。安全性の向上と常に人間が目で見て判断する監視作業の負担軽減につながる。
今回の実証実験により、実作業環境においても自動運転に必要とされる基本的な機能や安全確保の仕組みが問題なく動作することを確認できたことで、建設現場での生産性向上や安全確保に向けた自動運転の実用化に大きく近づいた。
WRITTEN by
