

人機一体は竹中土木と共同開発を進める、橋梁耐震補強用鋼製ブラケット取付ロボットのPoC試作機「人機スチュワートプラットフォーム ver.2.0」を2025国際ロボット展にて出展する。
現場での実用を見据えたロボットシステム全体として、揚重機械に取り付けた状態での初公開となる。
人機一体と竹中土木は2022年12月に資本提携を実施している。
竹中土木が「ロボットが拓く、新たな土木」をコンセプトに土木現場でのロボット適用に向けて、人機一体による知的財産活用サービス「人機プラットフォーム」の一つ「PF06 空間重作業人機社会実装プラットフォーム」に実用化企業として参画した。
両社は橋梁耐震補強用鋼製ブラケットの取付作業の機械化を目指し、同プラットフォームにて共同開発を進めてきた。
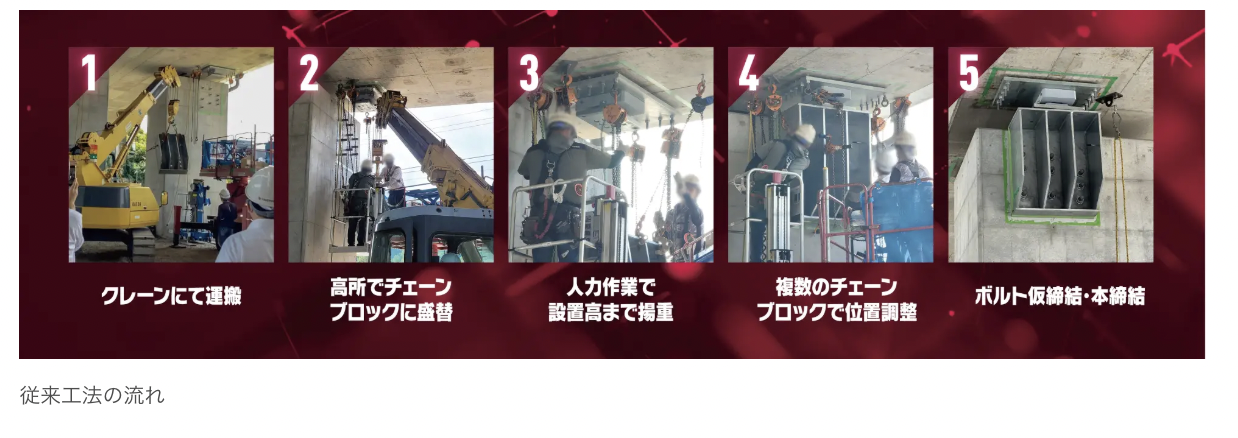
橋梁の耐震補強工事で桁下に鋼製ブラケットなどの重量物を取り付ける際、クレーンで持ち上げられる高さには限界があり、チェーンブロックで吊り上げてボルト位置に合わせて微調整するといった一連の作業を手作業で行なう必要がある。
高所作業車上での人力作業のため、安全性の確保や作業効率の向上が長年の課題だった。
2023年11月の2023国際ロボット展では、当時人機一体が独自に開発を行なっていた原理試作としてのPoC試作機「人機スチュワートプラットフォーム ver.1.3」を用いて、耐震補強ブラケットの取付作業を模したデモンストレーションを実施した。

木製のモックアップではあるものの、人による直感的な操作で短時間で取付作業を実現できることを示した。
今回開発した人機GSP ver.2.0は、ナット仮締結システム、ブラケット把持システム、スチュワートプラットフォームから構成。
クレーンなどの揚重機械のブーム先端に専用機械を用いて人機スチュワートプラットフォームを施工箇所まで接近させ、人機操作機から遠隔操作することでブラケットの位置・姿勢を自由自在に調整することができる。

従来工法ではブラケット一つあたり約120分要していたところを、スチュワートプラットフォームを用いる新工法により約30分まで削減することを見込んでいる。
2025年10月のハイウェイテクノフェア2025の竹中土木ブースにて建設用スチュワートプラットフォームとしてスチュワートプラットフォーム部分を初公開した。
現在はラフテレーンクレーンに搭載しての設置高約7メートルの場所への鋼製ブラケット取付作業の予備試験を進めている。

ナット仮締結システムはパワー増幅バイラテラル制御による遠隔操作・力制御対応の7自由度ロボットアームを搭載し、先端の7軸目の無限回転を使用してブラケット取付後のナット仮締結を行なう。
ブラケット把持システムは電磁石によりブラケットの吸着把持と取付後の解除を遠隔操作で行なうシステムを搭載している。
スチュワートプラットフォームは天板を支える6本のシリンダが相互に連携することで天板の三次元空間上での位置・姿勢を自在に制御できるロボットだ。
可搬重量は1000キログラムで、電動シリンダ単体出力は19600ニュートンとなっている。
2026年中を目標に鋼製ブラケット取付作業の実現場での実証試験を目指し開発を進めている。
現場での実用を見据えたロボットシステム全体として、揚重機械に取り付けた状態での初公開となる。
従来工法の約120分から約30分まで削減、ラフテレーンクレーンに搭載して初公開
人機一体と竹中土木は2022年12月に資本提携を実施している。
竹中土木が「ロボットが拓く、新たな土木」をコンセプトに土木現場でのロボット適用に向けて、人機一体による知的財産活用サービス「人機プラットフォーム」の一つ「PF06 空間重作業人機社会実装プラットフォーム」に実用化企業として参画した。
両社は橋梁耐震補強用鋼製ブラケットの取付作業の機械化を目指し、同プラットフォームにて共同開発を進めてきた。
橋梁の耐震補強工事で桁下に鋼製ブラケットなどの重量物を取り付ける際、クレーンで持ち上げられる高さには限界があり、チェーンブロックで吊り上げてボルト位置に合わせて微調整するといった一連の作業を手作業で行なう必要がある。
高所作業車上での人力作業のため、安全性の確保や作業効率の向上が長年の課題だった。
2023年11月の2023国際ロボット展では、当時人機一体が独自に開発を行なっていた原理試作としてのPoC試作機「人機スチュワートプラットフォーム ver.1.3」を用いて、耐震補強ブラケットの取付作業を模したデモンストレーションを実施した。
木製のモックアップではあるものの、人による直感的な操作で短時間で取付作業を実現できることを示した。
今回開発した人機GSP ver.2.0は、ナット仮締結システム、ブラケット把持システム、スチュワートプラットフォームから構成。
クレーンなどの揚重機械のブーム先端に専用機械を用いて人機スチュワートプラットフォームを施工箇所まで接近させ、人機操作機から遠隔操作することでブラケットの位置・姿勢を自由自在に調整することができる。
従来工法ではブラケット一つあたり約120分要していたところを、スチュワートプラットフォームを用いる新工法により約30分まで削減することを見込んでいる。
2025年10月のハイウェイテクノフェア2025の竹中土木ブースにて建設用スチュワートプラットフォームとしてスチュワートプラットフォーム部分を初公開した。
現在はラフテレーンクレーンに搭載しての設置高約7メートルの場所への鋼製ブラケット取付作業の予備試験を進めている。
ナット仮締結システムはパワー増幅バイラテラル制御による遠隔操作・力制御対応の7自由度ロボットアームを搭載し、先端の7軸目の無限回転を使用してブラケット取付後のナット仮締結を行なう。
ブラケット把持システムは電磁石によりブラケットの吸着把持と取付後の解除を遠隔操作で行なうシステムを搭載している。
スチュワートプラットフォームは天板を支える6本のシリンダが相互に連携することで天板の三次元空間上での位置・姿勢を自在に制御できるロボットだ。
可搬重量は1000キログラムで、電動シリンダ単体出力は19600ニュートンとなっている。
2026年中を目標に鋼製ブラケット取付作業の実現場での実証試験を目指し開発を進めている。
WRITTEN by
