

熊谷組は8月7日、スイス連邦工科大学チューリッヒ校(ETHZ)と共同開発したバックホウの把持機能を柔軟にする遠隔操作用ロボットハンドの公開実験をつくば市の技術研究所で実施した。
ムーンショット型研究開発事業「CAFEプロジェクト」の一環として、災害対応の効率化を進めるロボットハンド技術を建設機械に統合した災害対応システムの構築を目指している。
近年、激甚化・頻発化する自然災害現場における応急復旧作業では、作業員の安全確保と作業の迅速化が社会的な重要課題となっている。
特にがれきや災害対応機器など、形が定まらない対象物を安全かつ確実に取り扱うには、柔軟で繊細な把持機能が不可欠である。
従来の建設機械の把持機構(グラッパ)は重い物を掴むことには長けていたが、複雑な形状や壊れやすい物体の取り扱いには適していなかった。
今回披露されたロボットハンド技術は、ETHZが開発した複数の指をワイヤで駆動させる構造を持つシステムである。

4本の指を用い、対象物の形状に合わせて包み込むように柔らかく把持できる点が特徴となっている。
2021年頃からハンドの開発が始まり、機能向上やサイズの巨大化などを進めてきた。
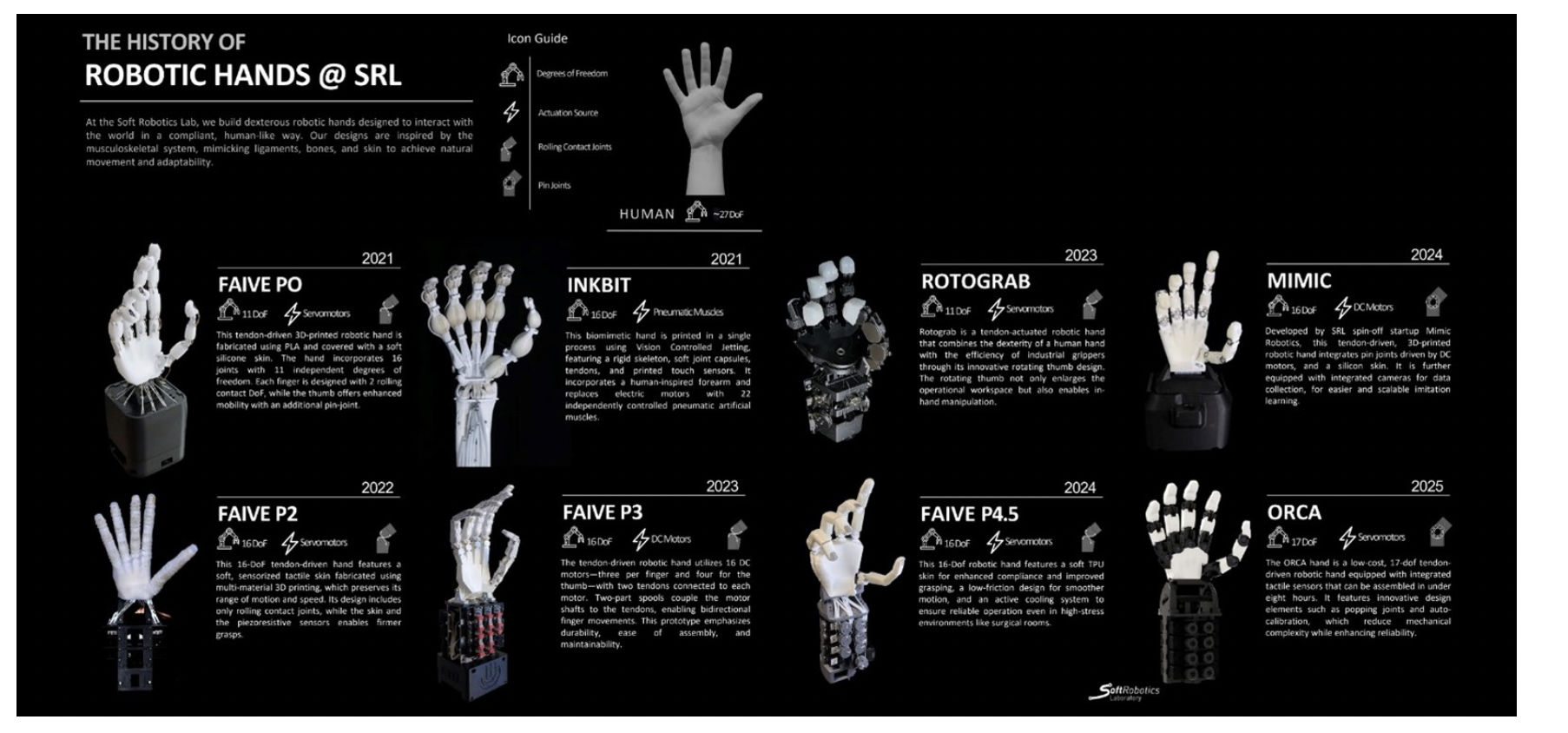 (開発の歴史)
(開発の歴史)
建設ロボット(バックホウ)は同社が開発を進める遠隔操作可能な小型建設ロボットで、災害対応を目的としてクローラ部が水に浸かっても稼働可能な設計となっている。
バケット部にロボットハンドやフォークグラブを取り付け、自由度と剛性を追加することで把持機能を向上させている。

今回の公開実験では、ワイヤ駆動式の柔軟な構造を持つロボットハンドが、従来のグラッパでは難しかった不定形のがれきや電線、ホースなどを安全かつ確実に把持できることを実証した。

2025年3月に動作確認を行ったプロトタイプ2号機から大型化したプロトタイプ3号機(手のひらの約3倍サイズ)の実用性を検証している。
ムーンショット型研究開発事業「CAFEプロジェクト」の一環として、災害対応の効率化を進めるロボットハンド技術を建設機械に統合した災害対応システムの構築を目指している。
ワイヤ駆動式4本指で不定形がれきや電線・ホースを安全確実に把持
近年、激甚化・頻発化する自然災害現場における応急復旧作業では、作業員の安全確保と作業の迅速化が社会的な重要課題となっている。
特にがれきや災害対応機器など、形が定まらない対象物を安全かつ確実に取り扱うには、柔軟で繊細な把持機能が不可欠である。
従来の建設機械の把持機構(グラッパ)は重い物を掴むことには長けていたが、複雑な形状や壊れやすい物体の取り扱いには適していなかった。
今回披露されたロボットハンド技術は、ETHZが開発した複数の指をワイヤで駆動させる構造を持つシステムである。
4本の指を用い、対象物の形状に合わせて包み込むように柔らかく把持できる点が特徴となっている。
2021年頃からハンドの開発が始まり、機能向上やサイズの巨大化などを進めてきた。
(開発の歴史)建設ロボット(バックホウ)は同社が開発を進める遠隔操作可能な小型建設ロボットで、災害対応を目的としてクローラ部が水に浸かっても稼働可能な設計となっている。
バケット部にロボットハンドやフォークグラブを取り付け、自由度と剛性を追加することで把持機能を向上させている。
今回の公開実験では、ワイヤ駆動式の柔軟な構造を持つロボットハンドが、従来のグラッパでは難しかった不定形のがれきや電線、ホースなどを安全かつ確実に把持できることを実証した。
2025年3月に動作確認を行ったプロトタイプ2号機から大型化したプロトタイプ3号機(手のひらの約3倍サイズ)の実用性を検証している。
WRITTEN by
