
国立研究開発法人情報通信研究機構(NICT)とテクノ菱和は、インパルス型超広帯域無線(IR-UWB)を用いて自律走行ロボット(AMR)を簡便に自律走行させるシステムの開発に成功した。
高精度な距離計測が可能なIR-UWBを用いて開発した自律走行システムは、事前に対象エリアの地図作成と座標標定作業をすることなしに、複数の目標地点に置かれたポータブルなIR-UWB端末と、AMRに載せたIR-UWB端末との間でリアルタイムに距離計測を行い、連続自動走行を行う。
クリーンルームでは気中微粒子濃度の測定を行うが、人間からは微粒子が発生するため多人数で測定することができず、少人数で測定を行ったとしても清浄度に影響を与えてしまうため、AMRを用いた測定が望まれている状況である。
自律走行方式としてLiDAR(Light Detection And Ranging)センサとSLAM(Simultaneous Localization And Mapping)を組み合わせたシステムが主流であるが、クリーンルームにはステンレスなどの鏡面が室内に存在し、レーザーによる測距が誤作動するために使用することができない。
磁気テープ及びカラーテープを床面に貼って誘導する自律走行方式も床を汚染するために使用できない課題があった。
上記の問題点を解決する方式として、今回はIR-UWBの高精度な距離計測の特長を利用して、自律走行システムを開発した。
従来のIR-UWB測位システムは「3点測位」に基づいており、AMR上のIR-UWB端末は3台以上のIR-UWB基準端末と送受信できるよう、対象エリアに複数台のIR-UWB基準端末を配置する必要があった。
さらに、全てのIR-UWB基準端末の座標標定と対象エリアの地図作成を事前に行わなければならず、これらの事前作業は効率性に欠けることが問題となっていた。
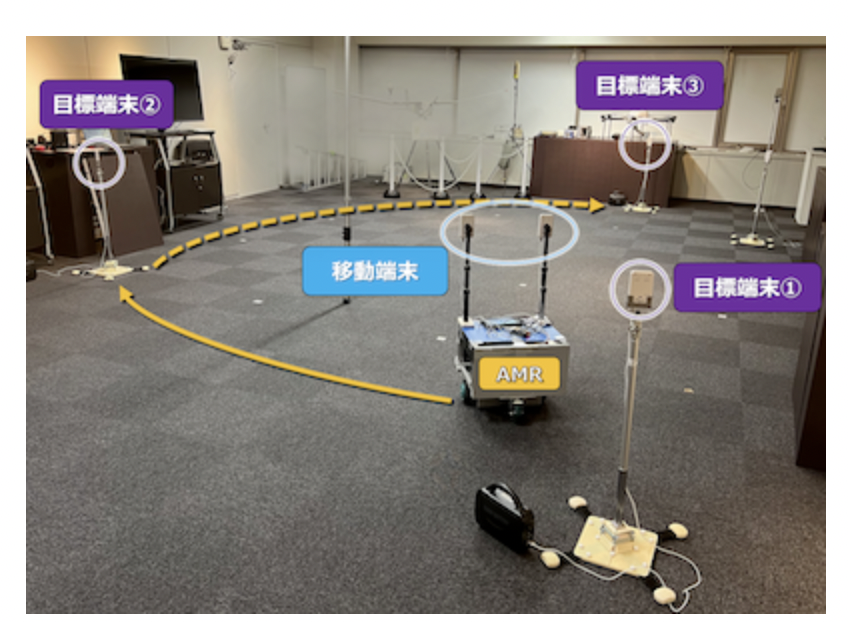
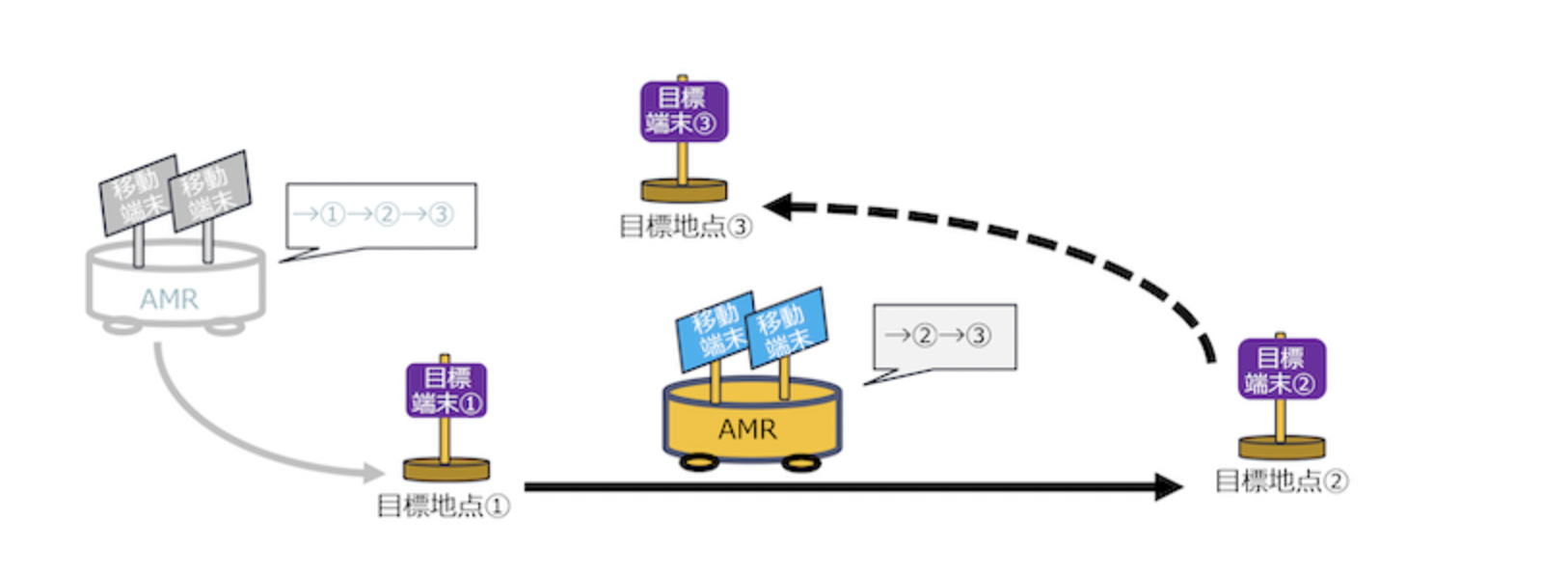
今回開発したIR-UWBを用いた自律走行システムは、事前の座標標定や地図作成が不要で、目標端末を置くだけで目標地点が設定され、移動端末を載せたAMRは各目標地点へ順に連続自動走行し、それぞれ20cmの精度で指定範囲に辿り着く仕様となっている。
このシステムは、「AMRに置く2台の移動端末と目標地点の目標端末との二つの距離計測結果に基づいて目標地点までの距離と方向角を推定するアルゴリズム(NICTが開発)を用いた目標地点推定部」と「AMRの走行速度・加速度及び回転角速度・角加速度を考慮に入れた駆動制御アルゴリズム(テクノ菱和が開発)を用いたAMR駆動制御部」の連携で成立するものとなっている。
目標地点推定部とAMR駆動制御部の間でリアルタイムに制御データ等を通信して、AMRは方向角をアップデートしながら走行する構造となっている。
本自律走行システムをクリーンルームの気中微粒子濃度測定に使用する場合、測定点に目標端末を置くだけで自動測定が可能となる。
これにより、測定時間を休憩時間や休日、夜間に設定可能となり、日中の作業時間には対象室に別の作業を割り当てることができる仕組みとなっている。
さらに、クリーンルーム内では人間は大きな発塵源で、ロボットは静止状態の人間と比べても発塵量が顕著に少ないことから、より正確な清浄度測定が可能となり、作業効率向上と測定精度向上に貢献できる。
本技術が実用化されれば、クリーンルーム等における環境計測作業の省力化と作業時間帯柔軟性がもたらされ、低発塵環境での清浄度測定が可能になる。
高精度な距離計測が可能なIR-UWBを用いて開発した自律走行システムは、事前に対象エリアの地図作成と座標標定作業をすることなしに、複数の目標地点に置かれたポータブルなIR-UWB端末と、AMRに載せたIR-UWB端末との間でリアルタイムに距離計測を行い、連続自動走行を行う。
従来3点測位システムから脱却。目標端末設置のみで目標地点設定。ステンレス鏡面でLiDAR誤作動・磁気テープ床面汚染問題解決
クリーンルームでは気中微粒子濃度の測定を行うが、人間からは微粒子が発生するため多人数で測定することができず、少人数で測定を行ったとしても清浄度に影響を与えてしまうため、AMRを用いた測定が望まれている状況である。
自律走行方式としてLiDAR(Light Detection And Ranging)センサとSLAM(Simultaneous Localization And Mapping)を組み合わせたシステムが主流であるが、クリーンルームにはステンレスなどの鏡面が室内に存在し、レーザーによる測距が誤作動するために使用することができない。
磁気テープ及びカラーテープを床面に貼って誘導する自律走行方式も床を汚染するために使用できない課題があった。
上記の問題点を解決する方式として、今回はIR-UWBの高精度な距離計測の特長を利用して、自律走行システムを開発した。
従来のIR-UWB測位システムは「3点測位」に基づいており、AMR上のIR-UWB端末は3台以上のIR-UWB基準端末と送受信できるよう、対象エリアに複数台のIR-UWB基準端末を配置する必要があった。
さらに、全てのIR-UWB基準端末の座標標定と対象エリアの地図作成を事前に行わなければならず、これらの事前作業は効率性に欠けることが問題となっていた。
今回開発したIR-UWBを用いた自律走行システムは、事前の座標標定や地図作成が不要で、目標端末を置くだけで目標地点が設定され、移動端末を載せたAMRは各目標地点へ順に連続自動走行し、それぞれ20cmの精度で指定範囲に辿り着く仕様となっている。
このシステムは、「AMRに置く2台の移動端末と目標地点の目標端末との二つの距離計測結果に基づいて目標地点までの距離と方向角を推定するアルゴリズム(NICTが開発)を用いた目標地点推定部」と「AMRの走行速度・加速度及び回転角速度・角加速度を考慮に入れた駆動制御アルゴリズム(テクノ菱和が開発)を用いたAMR駆動制御部」の連携で成立するものとなっている。
目標地点推定部とAMR駆動制御部の間でリアルタイムに制御データ等を通信して、AMRは方向角をアップデートしながら走行する構造となっている。
本自律走行システムをクリーンルームの気中微粒子濃度測定に使用する場合、測定点に目標端末を置くだけで自動測定が可能となる。
これにより、測定時間を休憩時間や休日、夜間に設定可能となり、日中の作業時間には対象室に別の作業を割り当てることができる仕組みとなっている。
さらに、クリーンルーム内では人間は大きな発塵源で、ロボットは静止状態の人間と比べても発塵量が顕著に少ないことから、より正確な清浄度測定が可能となり、作業効率向上と測定精度向上に貢献できる。
本技術が実用化されれば、クリーンルーム等における環境計測作業の省力化と作業時間帯柔軟性がもたらされ、低発塵環境での清浄度測定が可能になる。
WRITTEN by
