ニュース
ポケット・クエリーズ。四足歩行ロボットのライントレース機能を開発し夢洲で実証実験
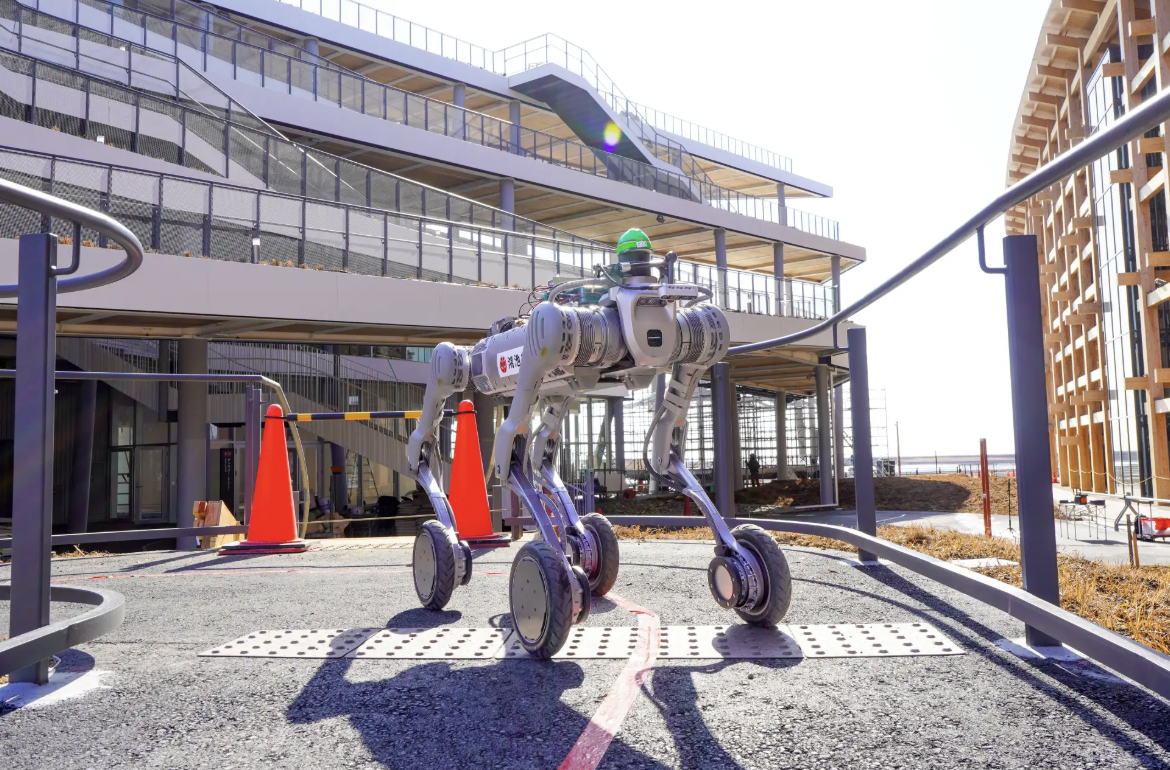

ポケット・クエリーズと鴻池組は共同で、建設現場での省人化・自動化を目指した四足歩行ロボットの「ライントレース機能」を開発した。
2025年2月、大阪・夢洲の国際博覧会施設整備工事現場で実証実験を行い、屋外環境での安定した自律走行に成功している。
新たに開発されたライントレース機能は、四足歩行ロボットに搭載された深度カメラと高度な画像認識技術を組み合わせたシステムである。
深度カメラとは撮影対象までの距離(深度)情報を取得できるカメラで、この技術を活用して床面に敷設したカラーテープを正確に認識・追従することで自律走行を可能にしている。
実証実験は最新の四足歩行ロボット「B2-W」(UNITREE社製)を使用して行われた。
実験場所となったのは、2025年日本国際博覧会(大阪・関西万博)施設整備事業の小催事場建設工事現場(施設正式名称:EXPOナショナルデーホール)である。
屋外特有の日照変化が激しい施工条件下においても、開発されたシステムは安定した走行性能を発揮した。
ポケット・クエリーズは特に、屋外の太陽光下で日向と日陰が激しく切り替わる撮像環境においても、正確にラインを検出するアルゴリズムを開発した点が貢献のポイントとなっている。
建設現場では、事前に計画された巡回経路や資材運搬ルートに沿って確実に移動できる自律走行技術が求められているが、屋外特有の照明条件の変化がその実現を難しくしていた。
今回開発された技術は、こうした課題を克服し、建設現場における四足歩行ロボットの実用化に向けた重要な一歩となる。
四足歩行ロボットは不整地や階段など従来の車輪型ロボットでは移動が困難だった環境でも安定して移動できる利点があり、建設現場での活用が期待されている。
ライントレース機能の実用化により、現場巡回や簡易な物資運搬、進捗確認などの作業自動化が視野に入ってきた。
2025年2月、大阪・夢洲の国際博覧会施設整備工事現場で実証実験を行い、屋外環境での安定した自律走行に成功している。
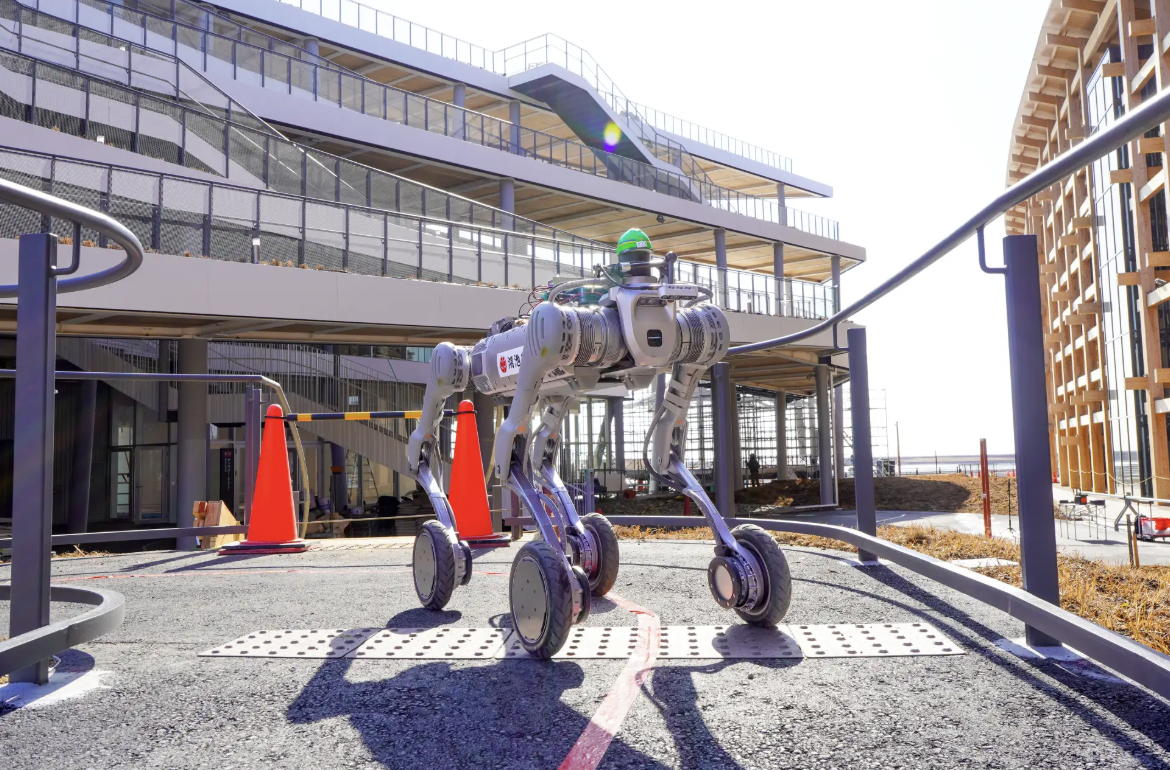
太陽光の日向日陰でも高精度走行、深度カメラと独自アルゴリズムで床面テープを追従
新たに開発されたライントレース機能は、四足歩行ロボットに搭載された深度カメラと高度な画像認識技術を組み合わせたシステムである。
深度カメラとは撮影対象までの距離(深度)情報を取得できるカメラで、この技術を活用して床面に敷設したカラーテープを正確に認識・追従することで自律走行を可能にしている。
実証実験は最新の四足歩行ロボット「B2-W」(UNITREE社製)を使用して行われた。
実験場所となったのは、2025年日本国際博覧会(大阪・関西万博)施設整備事業の小催事場建設工事現場(施設正式名称:EXPOナショナルデーホール)である。
屋外特有の日照変化が激しい施工条件下においても、開発されたシステムは安定した走行性能を発揮した。
ポケット・クエリーズは特に、屋外の太陽光下で日向と日陰が激しく切り替わる撮像環境においても、正確にラインを検出するアルゴリズムを開発した点が貢献のポイントとなっている。
建設現場では、事前に計画された巡回経路や資材運搬ルートに沿って確実に移動できる自律走行技術が求められているが、屋外特有の照明条件の変化がその実現を難しくしていた。
今回開発された技術は、こうした課題を克服し、建設現場における四足歩行ロボットの実用化に向けた重要な一歩となる。
四足歩行ロボットは不整地や階段など従来の車輪型ロボットでは移動が困難だった環境でも安定して移動できる利点があり、建設現場での活用が期待されている。
ライントレース機能の実用化により、現場巡回や簡易な物資運搬、進捗確認などの作業自動化が視野に入ってきた。
WRITTEN by
