
西松建設は、建設関係機械の設計/製作を手掛けるジオマシンエンジニアリング、建機レンタルのカナモトと共同開発したホイールローダ遠隔操作システム「Tunnel RemOS-WL」の実用機を、実際の山岳トンネル施工に試験導入した。
国土交通省 四国地方整備局が発注した高知県幡多郡黒潮町のトンネル工事のずり出し作業(掘削岩塊の運搬作業)で遠隔操作システムを試験運用した。
遠隔操作の経験値が異なる操作者2人により、搭乗操作でのサイクルタイム(平均54秒)との比較を行ったところ、遠隔操作の施工効率は平均75秒から95秒で、約6割~7割程度となった。
最短記録を見ると、遠隔操作の経験が豊富なオペ―レーターの最短記録は59秒と施工効率は9割を超え、オペレーターの習熟度が施工効率の向上に寄与していることが分かった。

ホイールローダは山岳トンネル工事の施工機械の中でも、高速で繊細な動作が求められる。
正確に制御できる遠隔操作技術は、2027年度の実用化を目指す山岳トンネル無人化/自動化施工システム「Tunnel RemOS」実施工への本格運用に向けた大きな一歩だとしている。
実用機は、2020年4月に開発した試作機の実用化に向けて、操作性や耐久性などの課題を解決するため、操作制御機構を改善するとともに、機体に搭載したカメラなどの機器類を衝撃/振動に強い機器へ改良した。
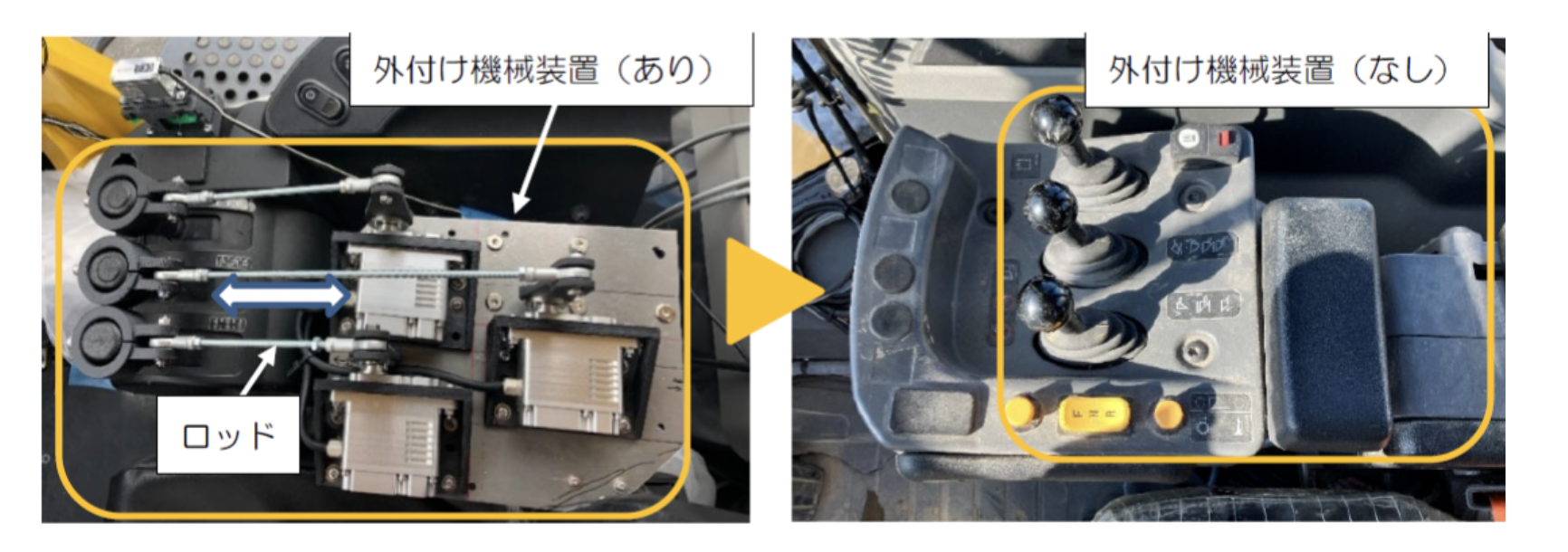
試作機はキャビン内のアーム/バケット操作レバーに対して、ロッドなどをレバーに外付けする機械的制御を採用していた。実用機はホイールローダ内部の電子回路へ信号を伝送する電気的制御に変更し、応答精度を向上した。
バケット部の自動上昇機能や水平保持機能などのサポート機能も搭載。実機搭乗に近い操作感覚と、作業の簡易化を図った。
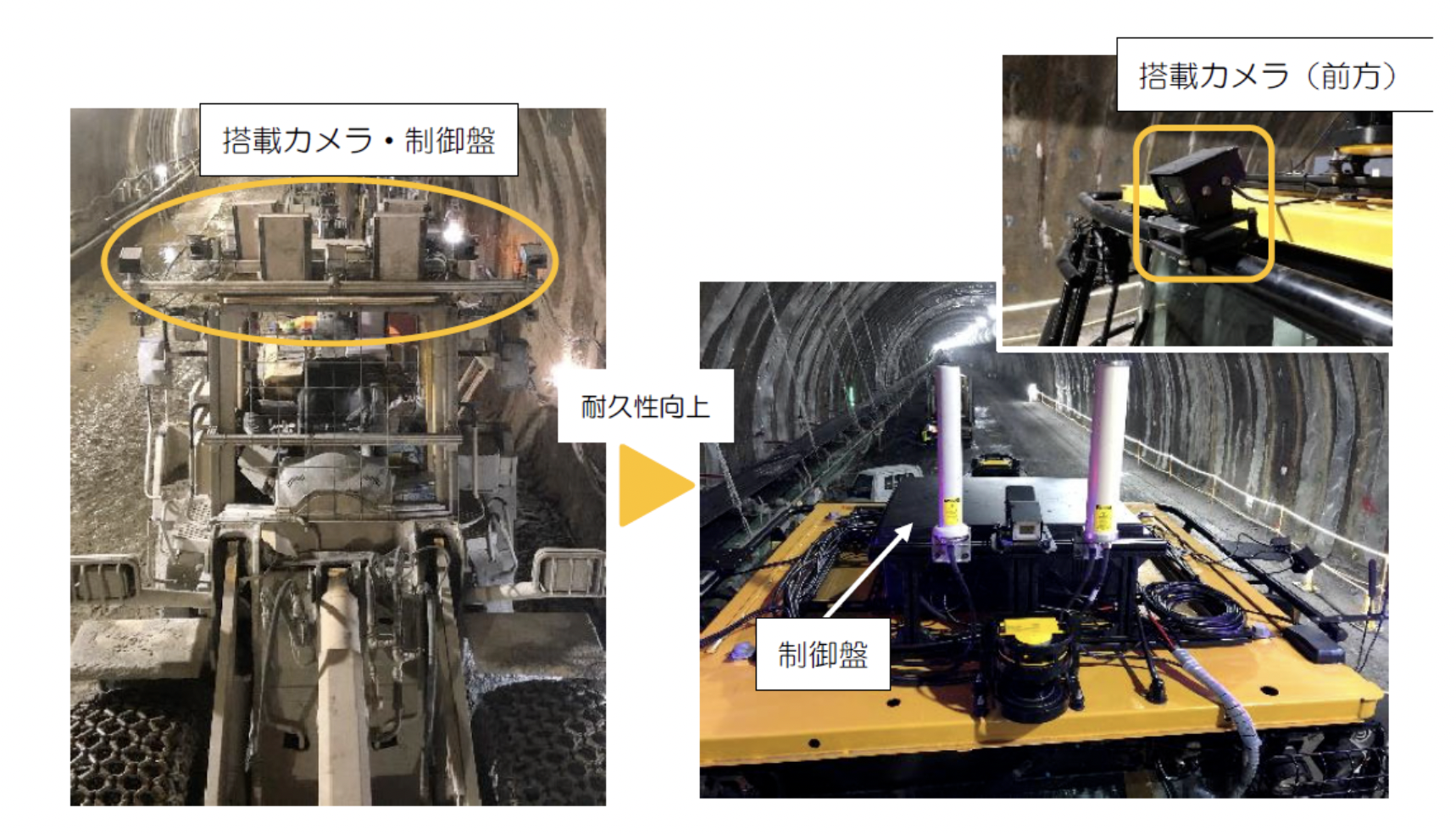
また、ホイールローダによるずり出し作業は、掘削で発生したずりを切羽から100メートル程度離れたずり破砕装置(クラッシャー)まで運搬、投入を数十回繰り返す。機体には激しい衝撃・振動が加わるため、試作機での適用試験では、作業時の衝撃、振動によるカメラや制御盤内の電子部品が破損するトラブルも確認された。
実用機では、より小型かつ軽量なカメラや衝撃に強い制御盤へと改良し、実機への固定もより堅固にすることで、作業時に繰り返し受ける激しい衝撃、振動の影響を低減させ、耐久性を向上した。
国土交通省 四国地方整備局が発注した高知県幡多郡黒潮町のトンネル工事のずり出し作業(掘削岩塊の運搬作業)で遠隔操作システムを試験運用した。
遠隔操作の経験値が異なる操作者2人により、搭乗操作でのサイクルタイム(平均54秒)との比較を行ったところ、遠隔操作の施工効率は平均75秒から95秒で、約6割~7割程度となった。
最短記録を見ると、遠隔操作の経験が豊富なオペ―レーターの最短記録は59秒と施工効率は9割を超え、オペレーターの習熟度が施工効率の向上に寄与していることが分かった。
ホイールローダは山岳トンネル工事の施工機械の中でも、高速で繊細な動作が求められる。
正確に制御できる遠隔操作技術は、2027年度の実用化を目指す山岳トンネル無人化/自動化施工システム「Tunnel RemOS」実施工への本格運用に向けた大きな一歩だとしている。
実用機は、2020年4月に開発した試作機の実用化に向けて、操作性や耐久性などの課題を解決するため、操作制御機構を改善するとともに、機体に搭載したカメラなどの機器類を衝撃/振動に強い機器へ改良した。
試作機はキャビン内のアーム/バケット操作レバーに対して、ロッドなどをレバーに外付けする機械的制御を採用していた。実用機はホイールローダ内部の電子回路へ信号を伝送する電気的制御に変更し、応答精度を向上した。
バケット部の自動上昇機能や水平保持機能などのサポート機能も搭載。実機搭乗に近い操作感覚と、作業の簡易化を図った。
また、ホイールローダによるずり出し作業は、掘削で発生したずりを切羽から100メートル程度離れたずり破砕装置(クラッシャー)まで運搬、投入を数十回繰り返す。機体には激しい衝撃・振動が加わるため、試作機での適用試験では、作業時の衝撃、振動によるカメラや制御盤内の電子部品が破損するトラブルも確認された。
実用機では、より小型かつ軽量なカメラや衝撃に強い制御盤へと改良し、実機への固定もより堅固にすることで、作業時に繰り返し受ける激しい衝撃、振動の影響を低減させ、耐久性を向上した。
参考・画像元:西松建設プレスリリース
WRITTEN by
